MediaPipe BlazePose 3次元姿勢推定プログラムによる実験・研究スキルの基礎
Colabのページ(ソースコードと説明): https://colab.research.google.com/drive/13nOMSW0Dzx_LjN9XEG99jtvgMACl4m9V?usp=sharing

【目次】
プログラムの使用法
1. このプログラムの利用シーン
静止画像から人体の姿勢を3次元的に分析するツールである。フィットネスのフォーム確認、ヨガのポーズ分析、医療やリハビリテーションにおける姿勢評価、スポーツ科学における動作解析などに活用できる。
2. 主な機能
- 33個の人体キーポイント検出:頭部、胴体、四肢、手足の詳細なランドマークを検出する。
- 3次元座標取得:実世界のメートル単位で正規化された3次元座標を出力する。
- パラメータ調整機能:検出信頼度(0.0から1.0)とモデル複雑度(0から2)をスライダーで調整できる。
- 多視点表示:元画像、2次元検出結果、3次元骨格を同時に表示する。
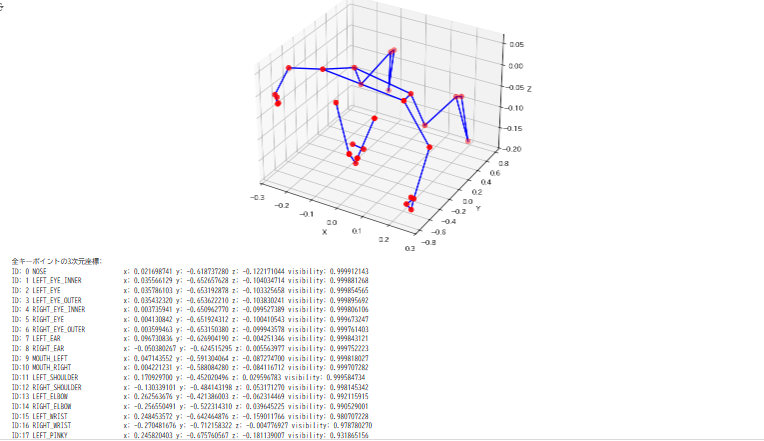
- 詳細データ出力:全キーポイントの座標とvisibilityスコアを数値で確認できる。
3. 基本的な使い方
- Google Colabでプログラムを実行する。
- 初回実行時、MediaPipeが自動的にインストールされ、ランタイムが再起動される。
- 再起動後、再度プログラムを実行する。
- 「ファイルを選択」ボタンが表示されるので、分析したい画像をアップロードする。
- 「検出信頼度」と「モデル複雑度」のスライダーを調整し、検出結果を確認する。
4. 便利な機能
- 検出信頼度の調整:閾値を上げると、確実に検出されたキーポイントのみが表示される。ノイズを減らしたい場合に有用である。
- モデル複雑度の選択:複雑度0は処理が速く、複雑度2は精度が向上する。画像の難易度に応じて選択する。
- リアルタイムプレビュー:パラメータを変更すると即座に結果が更新されるため、試行錯誤が容易である。
- 座標データの活用:出力される数値データは、コピーして外部の分析ツールで利用できる。
プログラムの説明
概要
このプログラムは、MediaPipe BlazePoseを用いた静止画像からの3次元姿勢推定システムである。Google Colab環境で動作し、アップロードした画像から人体の33個のキーポイントを検出する。検出結果は2次元画像および3次元座標系で可視化され、各キーポイントの詳細な座標情報が出力される。
主要技術
MediaPipe BlazePose
Googleが2020年のCVPR Workshop (CV4ARVR)で発表した姿勢推定モデルである[1][2]。従来のCOCOトポロジー(17キーポイント)を拡張し、33個の3次元キーポイントを検出する。モバイルデバイス上でリアルタイム推論が可能であり、フィットネスや手話認識などの用途に適している[1]。検出器とトラッカーの二段階パイプラインを採用し、顔検出に基づいて人体の位置を特定した後、全キーポイントを予測する[2]。
技術的特徴
- 静止画像モードでの処理
動画ではなく静止画像に特化した設定により、各画像を独立して処理する。時系列情報を利用しない単一画像からの姿勢推定を実現する。
- モデル複雑度の選択
model_complexityパラメータ(0から2)により、推論速度と精度のバランスを調整できる[3]。値が大きいほど精度が向上するが、計算コストも増加する。
- 3次元ワールド座標系
pose_world_landmarksにより、実世界のメートル単位で正規化された3次元座標を取得する。カメラの視点に依存しない姿勢情報が得られる。
- 信頼度に基づくフィルタリング
各キーポイントのvisibilityスコアを用いて、検出信頼度が閾値を下回るキーポイントをフィルタリングする機能を備える。
実装の特色
- Google Colab最適化
Google Colab環境に特化した設計であり、files.upload()による画像アップロード機能と、MediaPipeの自動インストール・ランタイム再起動機能を備える。
- 多視点可視化
2行2列のレイアウトで、元画像、2次元検出結果、3次元姿勢を同時表示する。3次元プロットでは、キーポイント間の接続線も描画され、骨格構造を視覚的に理解できる。
- 適応的描画サイズ調整
画像の解像度に応じて、ランドマークの線の太さや円の半径を自動調整する。様々なサイズの画像に対して適切な可視化を実現する。
- 詳細な座標出力
全33キーポイントの3次元座標を小数点以下9桁の精度で表示する。各キーポイントのID、名称、x/y/z座標、visibilityスコアを含む包括的な情報を提供する。
- インタラクティブな実験環境
ipywidgetsのinteractデコレータを用いることで、パラメータを変更するたびに自動的に再処理と再描画が実行される。試行錯誤を通じた調整が容易になる。
参考文献
[1] Bazarevsky, V., Grishchenko, I., Raveendran, K., Zhu, T., Zhang, F., & Grundmann, M. (2020). BlazePose: On-device Real-time Body Pose tracking. arXiv preprint arXiv:2006.10204. https://arxiv.org/abs/2006.10204
[2] Google Research Blog. (2020). On-device, Real-time Body Pose Tracking with MediaPipe BlazePose. https://research.google/blog/on-device-real-time-body-pose-tracking-with-mediapipe-blazepose/
[3] Google AI for Developers. MediaPipe Pose Landmark Detection Guide. https://ai.google.dev/edge/mediapipe/solutions/vision/pose_landmarker
実験・研究スキルの基礎:Google Colabで学ぶ3次元姿勢推定実験
1. 実験・研究のスキル構成要素
実験や研究を行うには、以下の5つの構成要素を理解する必要がある。
1.1 実験用データ
このプログラムでは静止画像ファイルが実験用データである。人体が写っている画像を使用することで、姿勢推定の性能を評価できる。
1.2 実験計画
何を明らかにするために実験を行うのかを定める。
計画例は以下のとおりである。
- パラメータ(検出信頼度、モデル複雑度)を変更して、検出結果の変化を観察する。
- 明瞭な姿勢の画像と複雑なポーズの画像で、必要なパラメータ設定を比較する。
- 3次元座標データの特性を理解する。
1.3 プログラム
実験を実施するためのツールである。このプログラムはMediaPipe BlazePoseを使用している。プログラムの機能を理解して活用することが基本である。基本となるプログラムを出発点として、将来、機能を自分で追加することができる。
1.4 プログラムの機能
このプログラムは静止画像から人体の33個のキーポイントを検出し、2次元および3次元で可視化する。
使用する技術は以下のとおりである。
- MediaPipe BlazePose:Googleが開発した姿勢推定モデルである[1][2]。従来のCOCOトポロジー(17キーポイント)を拡張し、33個の3次元キーポイントを検出する。検出器とトラッカーの二段階パイプラインを採用し、顔検出に基づいて人体の位置を特定した後、全キーポイントを予測する。
- 3次元ワールド座標系:実世界のメートル単位で正規化された3次元座標を取得する。カメラの視点に依存しない姿勢情報が得られる。
- ipywidgets:パラメータのリアルタイム調整用UIである。
実験手順は以下のとおりである。
- 処理する画像を準備しておく。
- Colabのページを開く。
- Google Colabでプログラムを実行する。
Colabのページ(ソースコードと説明): https://colab.research.google.com/drive/13nOMSW0Dzx_LjN9XEG99jtvgMACl4m9V?usp=sharing
- 初回実行時、MediaPipeが自動インストールされ、ランタイムが再起動される。
- 再起動後、プログラムを再実行する。
- 「ファイルを選択」ボタンから画像を選択する。
- 「検出信頼度」(0.0から1.0)と「モデル複雑度」(0から2)のスライダーが表示される。
- パラメータを変更すると、自動的に再処理と可視化が実行される。
パラメータの機能は以下のとおりである。
- 検出信頼度:キーポイント検出の信頼性を制御する。信頼度0.3では多くのキーポイントが検出される。信頼度0.5ではバランスの取れた結果が得られる(デフォルト値)。信頼度0.8では高信頼度のキーポイントのみが残る。
- モデル複雑度:推論速度と精度のトレードオフを制御する[3]。複雑度0は処理が速く精度は低い。複雑度1は速度と精度のバランスが取れている。複雑度2は処理時間は長いが精度が向上する(デフォルト値)。
出力情報は以下のとおりである。
- 可視化結果:元画像(左上)、2次元検出結果(右上、緑色のランドマークと接続線)、3次元骨格構造(下段、赤い点と青い線)を2行2列で表示する。
- 数値データ:全33キーポイントの詳細情報を表示する。ID(0から32)、名称(NOSE、LEFT_SHOULDER等)、x/y/z座標(小数点以下9桁)、visibility(検出信頼度スコア、0.0から1.0)を含む。
- 適応的描画:画像の解像度に応じて、線の太さや円の半径を自動調整する。
1.5 検証(結果の確認と考察)
プログラムの実行結果を観察し、姿勢推定の動作を考察する。
基本認識は以下のとおりである。
- 入力画像を変えると結果が変わる。その変化を観察することが実験である。
- パラメータを変えると結果が変わる。その変化を観察することが実験である。
- 「良い結果」「悪い結果」は目的によって異なる。
観察のポイントは以下のとおりである。
- 検出されたキーポイントの数はいくつか。
- 信頼度不足のキーポイント(「null」と表示)はどれか。
- パラメータを変更したとき、結果はどう変化するか。
- 明瞭な姿勢の画像では低い複雑度でも良好な結果が得られるか。
- 複雑なポーズでは高い複雑度が必要となるか。
2. 間違いの原因と対処方法
2.1 プログラムのミス(人為的エラー)
モデルの読み込みに時間がかかる場合がある。
- 原因:初回実行時にMediaPipeモデルをダウンロードしている。
- 対処方法:これは正常な動作である。ダウンロードが完了するまで待つ。
画像を読み込めない場合がある。
- 原因:画像ファイルの形式が対応していない、またはファイルが破損している。
- 対処方法:JPEG、PNGなどの一般的な画像形式を使用する。
2.2 期待と異なる結果が出る場合
キーポイントが検出されない場合がある。
- 原因:画像内の人体が小さすぎる、横向きや一部が隠れている、画像の品質が低い。
- 対処方法:人体がはっきり写っている画像を使用する。人体のサイズが大きい画像を選ぶ。
キーポイントの数が少ない場合がある。
- 原因:検出信頼度の閾値が高すぎる、または画像の条件が難しい。
- 対処方法:検出信頼度を下げる。モデル複雑度を上げる。
検出結果が不正確な場合がある。
- 原因:モデル複雑度が低い、または画像の条件(角度、照明、画質)が難しい。
- 対処方法:モデル複雑度を上げる。異なる画像で再度試す。
3. 実験レポートのサンプル
パラメータ調整が検出結果に与える影響
実験目的は以下のとおりである。
(例文)検出信頼度とモデル複雑度のパラメータ調整が、キーポイント検出結果に与える影響を評価する。
実験計画は以下のとおりである。
(例文)同一画像に対して異なるパラメータ設定を適用し、検出されるキーポイント数とvisibilityスコアを記録する。
実験方法は以下のとおりである。
(例文)以下のパラメータ組み合わせで実験する。
- 検出信頼度:0.3、0.5、0.8
- モデル複雑度:0、1、2
実験結果は以下のとおりである。
| 検出信頼度 | モデル複雑度 | 検出キーポイント数 | 平均visibility |
|---|---|---|---|
| 0.3 | 0 | XX個 | X.XXX |
| 0.3 | 2 | XX個 | X.XXX |
| 0.5 | 0 | XX個 | X.XXX |
| 0.5 | 2 | XX個 | X.XXX |
| 0.8 | 0 | XX個 | X.XXX |
| 0.8 | 2 | XX個 | X.XXX |
考察は以下のとおりである。
- (例文)検出信頼度を上げると、検出されるキーポイント数が減少した。
- (例文)モデル複雑度を上げると、平均visibilityスコアが向上した。
- (例文)明瞭な姿勢の画像では、モデル複雑度0でも良好な結果が得られた。
- (例文)複雑なポーズの画像では、モデル複雑度2が必要であることが確認できた。
結論は以下のとおりである。
(例文)本実験では、パラメータ調整が検出結果に大きく影響することが確認できた。画像の特性に応じて適切なパラメータを選択する必要がある。