OpenCV でカラーヒストグラム(Python を使用)
1. エグゼクティブサマリー
本プログラムは, https://github.com/opencv/opencv/blob/master/samples/python/color_histogram.py で公開されているサンプルコードをもとに作成したものである.
カメラ映像をリアルタイムに HSV 色空間(Hue, Saturation, Value の3成分で色を表現する色空間)へ変換し,色相(H)と彩度(S)の2次元ヒストグラムを算出・可視化する.OpenCV による動画表示を行う.
- OpenCV について [PDF] , [パワーポイント]
- OpenCV のインストール,画像表示を行う C++ プログラムの実行手順: 別ページ »で説明
- OpenCV と Python を活用した画像・ビデオ処理プログラム: 別ページ »にまとめ
- OpenCV 4 の C/C++ プログラム: 別ページ »にまとめている.
【OpenCV の公式情報】
- OpenCV の公式ページ: https://opencv.org
- GitHub の OpenCV のページ: https://github.com/opencv/opencv/releases
Python 3.12 のインストール
Pythonのインストールを行い、Pythonのプログラムを実行する環境を整える。扱う環境は、Windows搭載パソコンである。金子研究室では、Python 3.12.10を推奨する。
[Windows での Python 3.12 のインストール手順を見るには、ここをクリック]
Windows での Python 3.12 のインストール
以下のいずれかの方法でPython 3.12をインストールする。Pythonがインストール済みの場合、この手順は不要である。
方法 1:winget によるインストール
【インストールコマンドの実行方法】
管理者権限でコマンドプロンプトを起動する(手順:Windowsキーまたはスタートメニュー → cmd と入力 → 右クリック → 「管理者として実行」)。そして、コマンド全体をコマンドプロンプトにコピー&ペーストする。
--scope machine を指定することで、システム全体(全ユーザー向け)にインストールされる。このオプションの実行には管理者権限が必要である。インストール完了後、コマンドプロンプトを再起動するとPATHが反映される。
REM Python 3.12 をシステム領域にインストール
winget install --id Python.Python.3.12 -e --scope machine --silent --accept-source-agreements --accept-package-agreements --override "/quiet InstallAllUsers=1 PrependPath=1 Include_test=0 Include_pip=1 Include_launcher=1 InstallLauncherAllUsers=1 TargetDir=\"C:\Program Files\Python312\""
REM Python と Scripts を PATH 先頭に追加
powershell -NoProfile -Command "$p='C:\Program Files\Python312'; $s=\"$p\Scripts\"; $c=[Environment]::GetEnvironmentVariable('Path','Machine'); if((Test-Path $p) -and (';'+$c+';' -notlike \"*;$p;*\") -and (';'+$c+';' -notlike \"*;$s;*\")){[Environment]::SetEnvironmentVariable('Path',\"$p;$s;$c\",'Machine')}"
方法 2:インストーラーによるインストール
- Python公式サイト(https://www.python.org/downloads/)にアクセスし、「Download Python 3.x.x」ボタンからWindows用インストーラーをダウンロードする。
- ダウンロードしたインストーラーを実行する。
- 初期画面の下部に表示される「Add python.exe to PATH」にチェックを入れてから「Customize installation」を選択する。このチェックを入れ忘れると、コマンドプロンプトから
pythonコマンドを実行できない。 - 「Install Python 3.xx for all users」にチェックを入れ、「Install」をクリックする。
インストールの確認
コマンドプロンプトで以下を実行する。
python --versionバージョン番号(例:Python 3.12.x)が表示されればインストール成功である。「'python' は、内部コマンドまたは外部コマンドとして認識されていません。」と表示される場合は、インストールが正常に完了していない。
Python の開発環境 Visual Studio Code のインストールと Python 用の設定
Python の開発環境Visual Studio Code(プログラムを編集するソフトウェア。以下、VS Code)を整える。
[Windows での Visual Studio Code のインストールと Python 用の設定手順を見るには、ここをクリック]
Windows での Visual Studio Code のインストールと Python 用の設定手順
1. VS Code と拡張機能のインストール
以下のコマンドにより,既存の VS Code を削除し,全ユーザー共有の設定で再インストールしたうえで,拡張機能(VS Code に機能を追加するソフトウェア)をまとめて導入する.
【インストールコマンドの実行方法】
管理者権限でコマンドプロンプトを起動する(手順:Windows キーまたはスタートメニュー → cmd と入力 → 右クリック → 「管理者として実行」)。そして,コマンド全体をコマンドプロンプトにコピー&ペーストする。
インストールコマンド
REM ============================================================
REM Microsoft Visual Studio Code
REM ============================================================
winget uninstall -e --id Microsoft.VisualStudioCode --silent --disable-interactivity --accept-source-agreements
rmdir /s /q C:\ProgramData\vscode-extensions 2>nul
rmdir /s /q "%APPDATA%\Code" 2>nul
rmdir /s /q "%USERPROFILE%\.vscode" 2>nul
rmdir /s /q "%LOCALAPPDATA%\Microsoft\vscode-update" 2>nul
REM VS Code をシステム領域に新規インストール
winget install --scope machine --id Microsoft.VisualStudioCode -e --silent --accept-source-agreements --accept-package-agreements
REM 全ユーザー共有の拡張機能フォルダ
mkdir C:\ProgramData\vscode-extensions 2>nul
icacls "C:\ProgramData\vscode-extensions" /grant "Everyone:(OI)(CI)M" /T
REM スタートメニューのショートカットを --extensions-dir 付きで再作成
rmdir /s /q "C:\ProgramData\Microsoft\Windows\Start Menu\Programs\Visual Studio Code" 2>nul
del "C:\ProgramData\Microsoft\Windows\Start Menu\Programs\Visual Studio Code.lnk" 2>nul
powershell -NoProfile -Command "$s=New-Object -ComObject WScript.Shell; $lnk=$s.CreateShortcut('C:\ProgramData\Microsoft\Windows\Start Menu\Programs\Visual Studio Code.lnk'); $lnk.TargetPath='C:\Program Files\Microsoft VS Code\Code.exe'; $lnk.Arguments='--extensions-dir \"C:\ProgramData\vscode-extensions\"'; $lnk.Save()"
REM ショートカットの検証
powershell -NoProfile -Command "$s=New-Object -ComObject WScript.Shell; $lnk=$s.CreateShortcut('C:\ProgramData\Microsoft\Windows\Start Menu\Programs\Visual Studio Code.lnk'); Write-Host 'TargetPath:' $lnk.TargetPath; Write-Host 'Arguments:' $lnk.Arguments"
REM ファイル / フォルダ右クリックの「Code で開く」を登録
reg add "HKLM\SOFTWARE\Classes\*\shell\VSCode\command" /ve /d "\"C:\Program Files\Microsoft VS Code\Code.exe\" --extensions-dir \"C:\ProgramData\vscode-extensions\" \"%1\"" /f
reg add "HKLM\SOFTWARE\Classes\Directory\shell\VSCode\command" /ve /d "\"C:\Program Files\Microsoft VS Code\Code.exe\" --extensions-dir \"C:\ProgramData\vscode-extensions\" \"%1\"" /f
reg add "HKLM\SOFTWARE\Classes\Directory\Background\shell\VSCode\command" /ve /d "\"C:\Program Files\Microsoft VS Code\Code.exe\" --extensions-dir \"C:\ProgramData\vscode-extensions\" \"%V\"" /f
REM --extensions-dir 付きで起動する code.cmd ラッパを作成
REM (%* を echo で書くと対話的 cmd で失われるため、PowerShell で [char]37+'*' を書き出す)
powershell -NoProfile -Command "$pct=[char]37; $q=[char]34; $c='@echo off'+[char]13+[char]10+$q+'C:\Program Files\Microsoft VS Code\bin\code.cmd'+$q+' --extensions-dir '+$q+'C:\ProgramData\vscode-extensions'+$q+' '+$pct+'*'+[char]13+[char]10; [IO.File]::WriteAllText('C:\ProgramData\vscode-extensions\vscode.cmd',$c,[Text.Encoding]::ASCII)"
REM 拡張機能のインストール
set "CODE=C:\Program Files\Microsoft VS Code\bin\code.cmd"
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --uninstall-extension GitHub.copilot
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --uninstall-extension GitHub.copilot-chat
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --install-extension ms-python.python
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --install-extension ms-python.vscode-pylance
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --install-extension ms-python.debugpy
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --install-extension MS-CEINTL.vscode-language-pack-ja
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --install-extension saoudrizwan.claude-dev
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --install-extension rust-lang.rust-analyzer
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --install-extension tamasfe.even-better-toml
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --install-extension anthropic.claude-code
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --install-extension almenon.arepl
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --list-extensions --show-versions
echo === セットアップ完了 ===
2. Python インタプリタの選択
同一マシンに複数の Python がインストールされている場合,VS Code で使用する Python 本体(インタプリタ:Python プログラムを解釈・実行するソフトウェア)を選択する必要がある.
- コマンドパレット(コマンド名で機能を呼び出す VS Code の入力欄)を開く(
Ctrl+Shift+P) Python: Select Interpreterと入力する
- 表示される一覧から,使用する Python(例:
C:\Program Files\Python312\python.exe)を選択する.
Python プログラム実行手順
[Windows での Python プログラム実行手順を見るには、ここをクリック]
Windows での Python 実行手順(Visual Studio Codeを使用)
プログラムファイルの作成と保存
- 左サイドバーの「エクスプローラー」アイコン(
Ctrl+Shift+E)をクリックする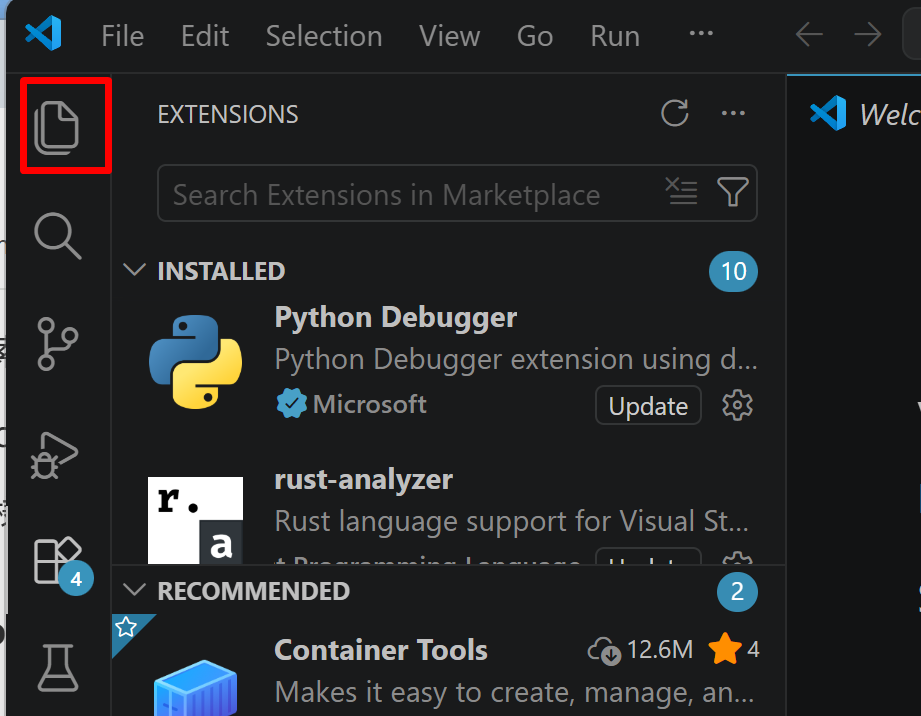
- 「NO FOLDER OPENED」(作業対象フォルダが未選択の状態)と表示される場合は,「Open Folder」をクリックし,プログラムを保存するフォルダを選択する
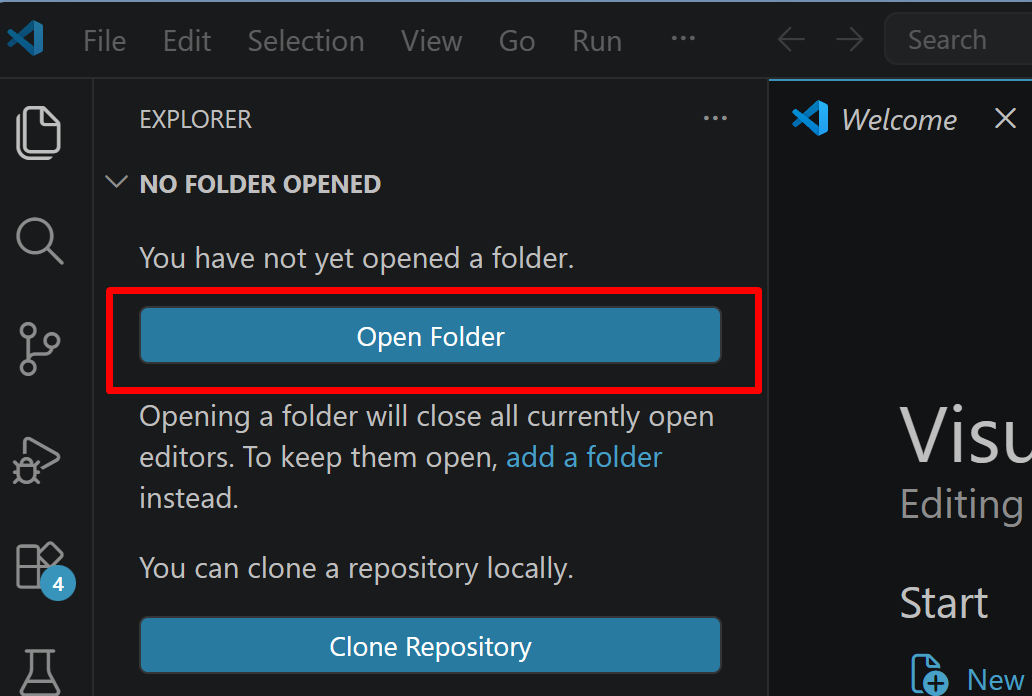
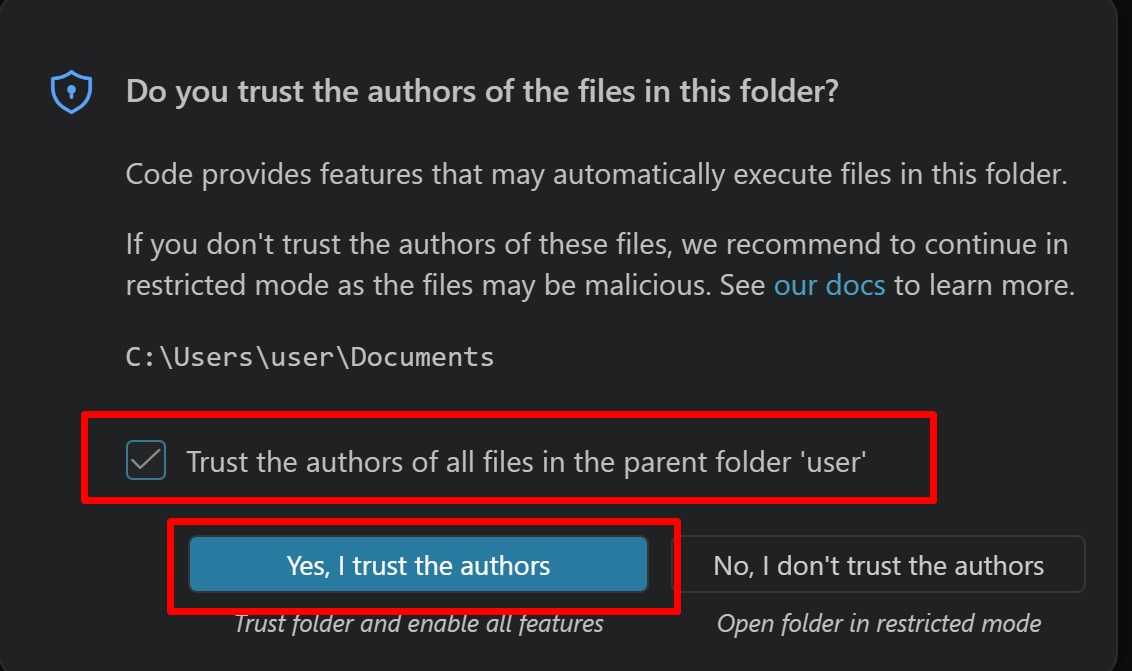
続いて「フォルダを信用するか」を確認する画面(フォルダ内のコードを実行してよいか確認する VS Code の仕組み)が表示されるので,チェックして Yes を選択する
- フォルダ名の右側に表示される「新しいファイル」アイコンをクリックする
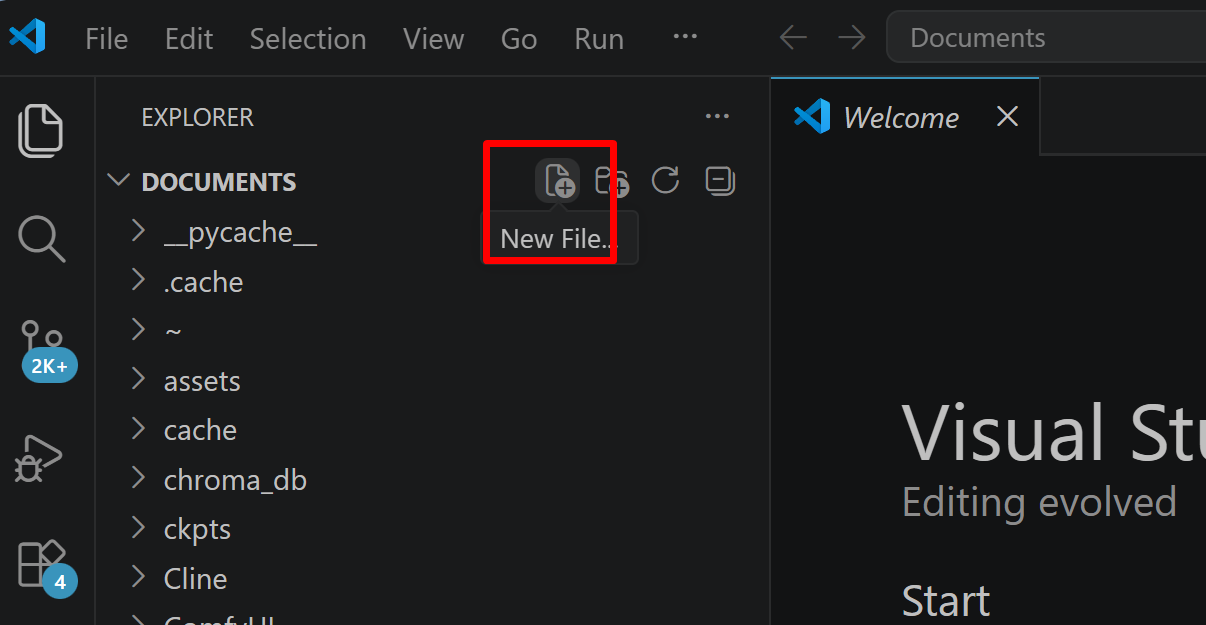
- ファイル名(例:
aitask.py.ファイル名は何でも良い)を入力しEnterを押す.拡張子は.py(Python ファイルを示す拡張子)とする
- 実行したいコードを選択し,
Ctrl+Cでコピーする.VS Code のエディタ領域にCtrl+Vで貼り付ける Ctrl+Sで保存する
プログラムの実行
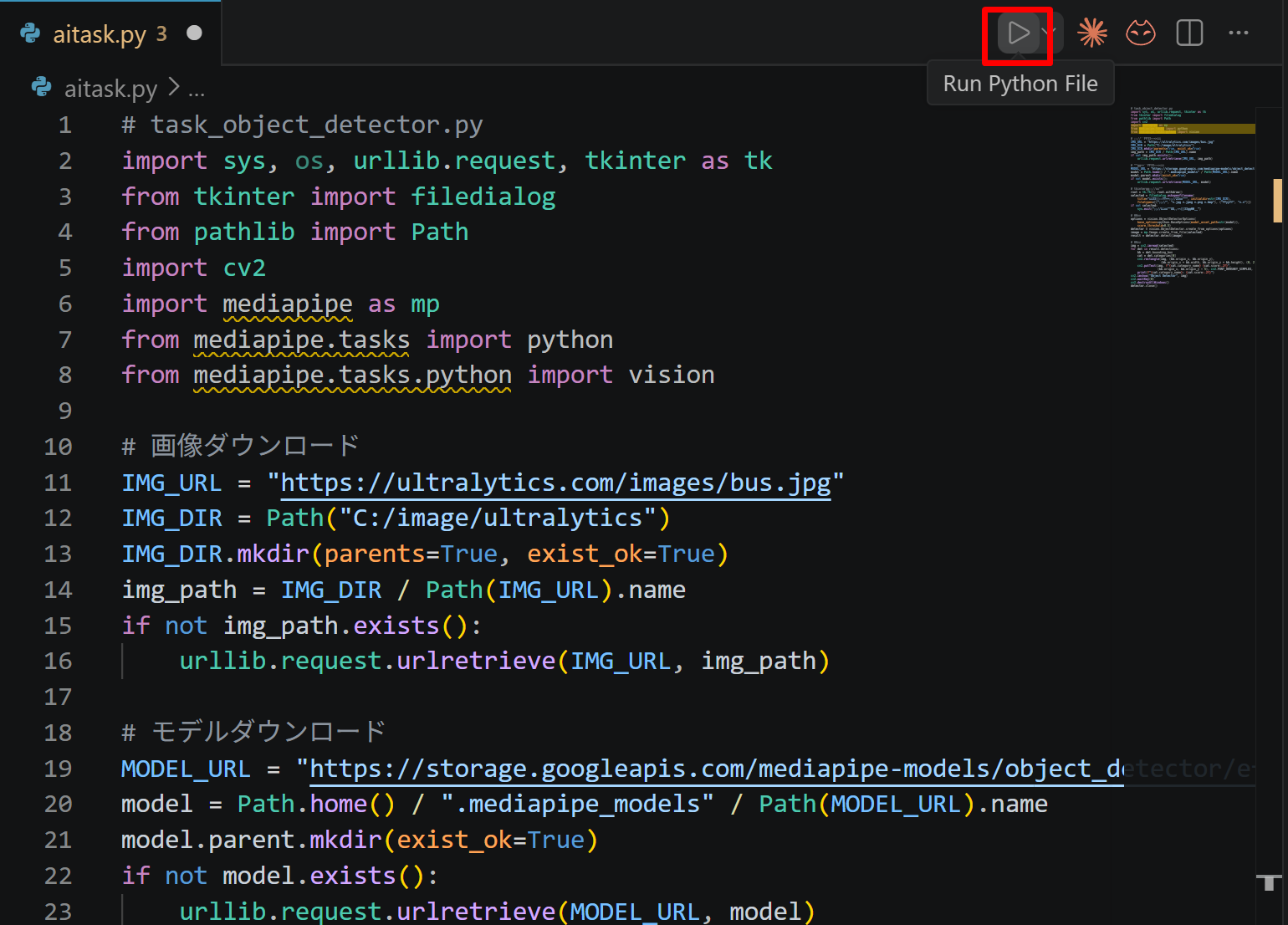
- エディタ右上の三角形「▷」アイコン(Run Python File:現在開いている Python ファイルを実行するボタン)をクリックする.または,エディタ上で右クリックし「ターミナルで Python ファイルを実行」を選択する
- VS Code 下部のターミナル(コマンドの入出力を表示する画面)に,実行結果(
print関数の出力等)が表示される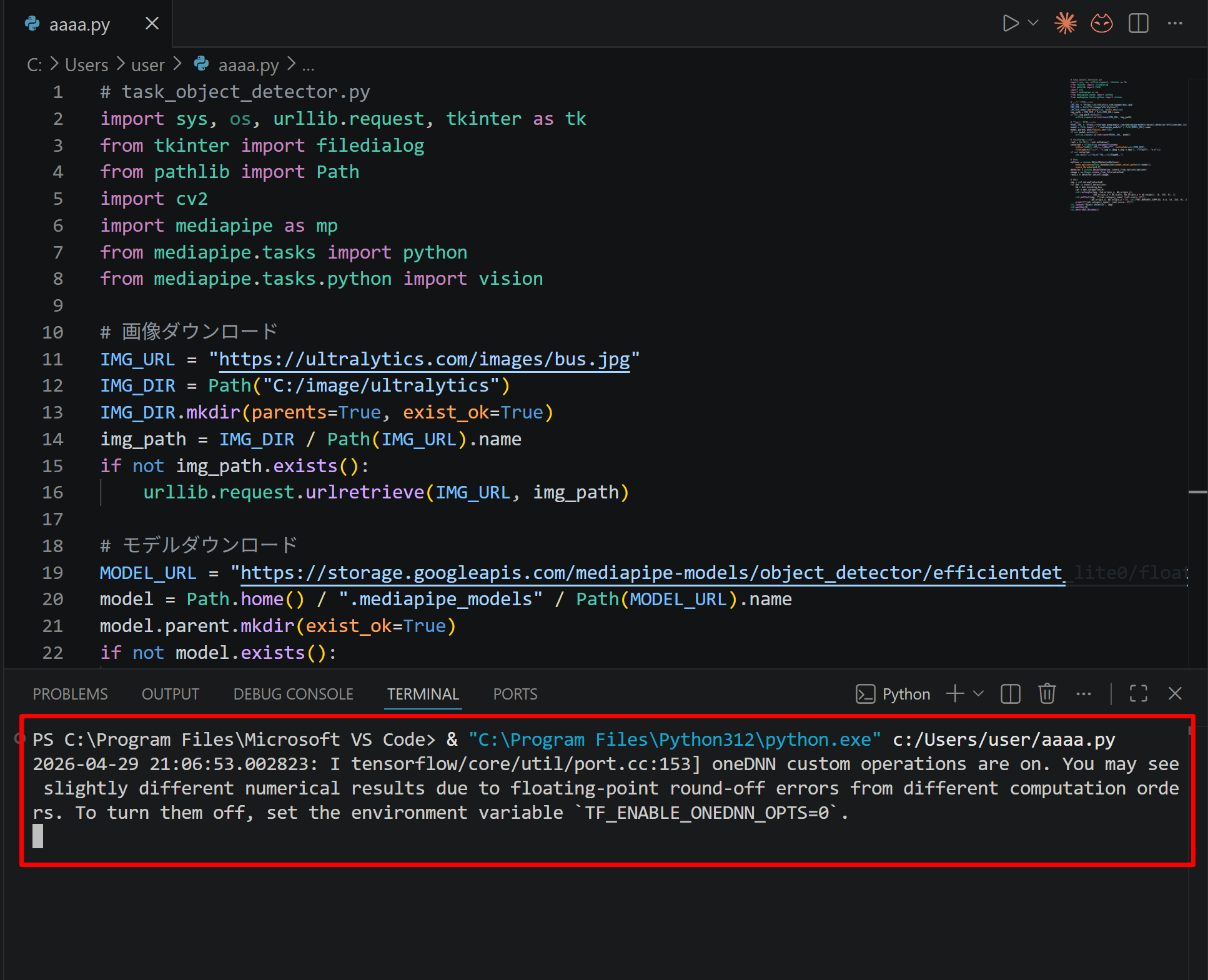
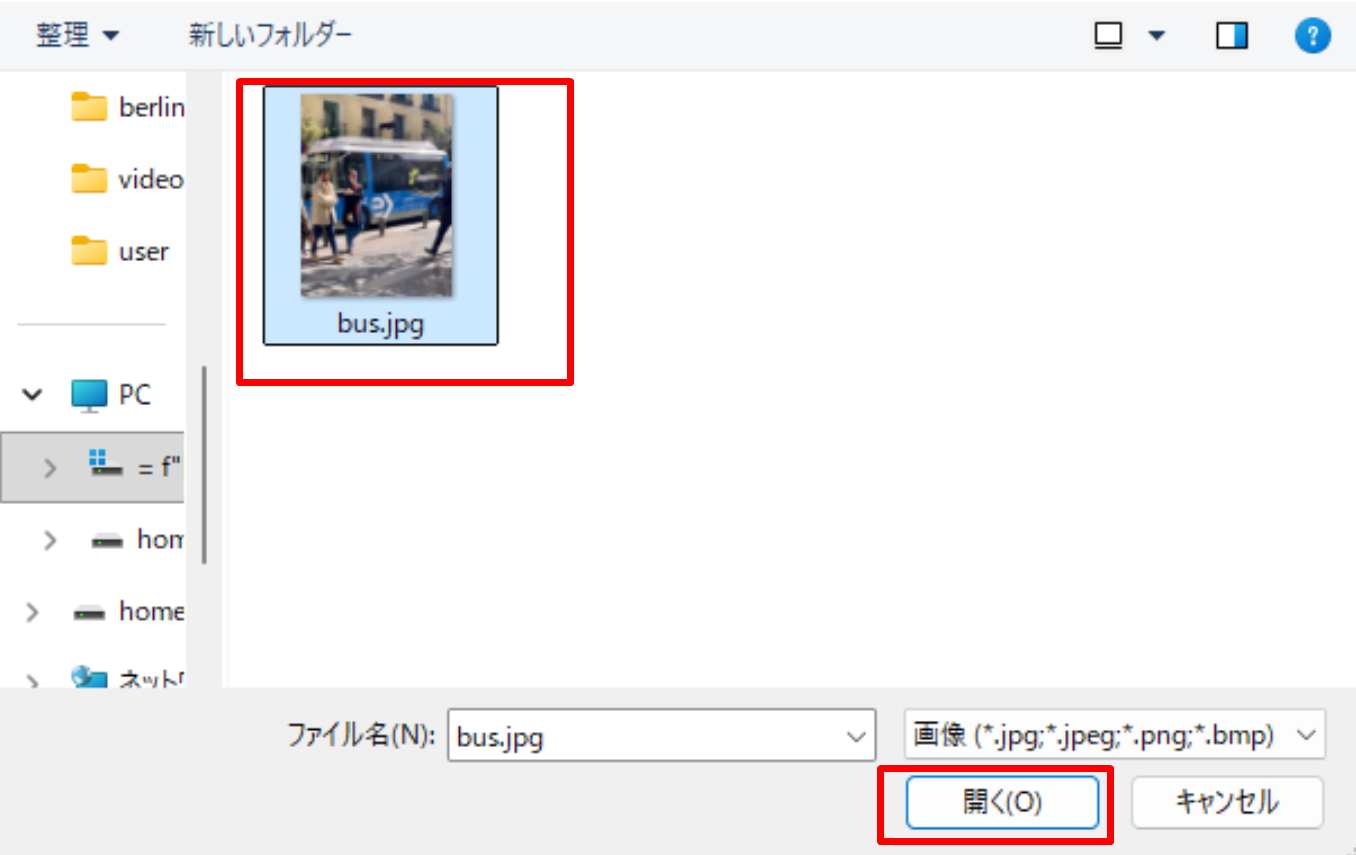
- tkinter(Python 標準の GUI ライブラリ)のファイル選択ダイアログを使うプログラムを実行した場合は,ダイアログが開くので対象画像を選択する
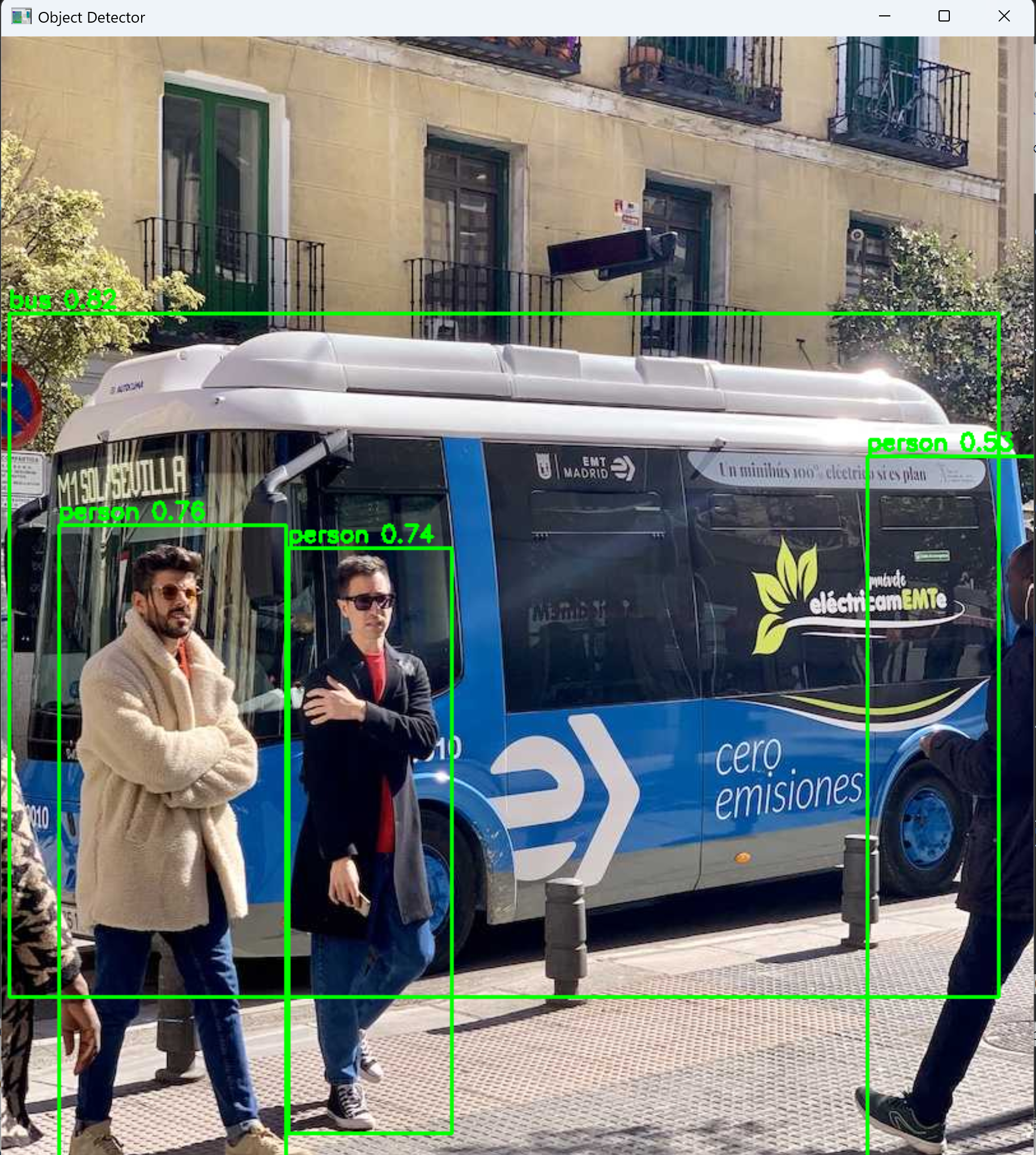
- VS Code 下部のターミナルで実行結果を確認する.OpenCV ウィンドウ(OpenCV が画像を表示するために開く専用ウィンドウ)が開いた場合はそちらも確認する.OpenCV ウィンドウは,マウスクリックでウィンドウをアクティブ(操作対象の状態)にしてからキーを押すと終了する

必要なライブラリのインストール
管理者権限のコマンドプロンプトで以下を実行する。管理者権限のコマンドプロンプトを起動するには、Windows キーまたはスタートメニューから「cmd」と入力し、表示された「コマンドプロンプト」を右クリックして「管理者として実行」を選択する。
pip install -U numpy opencv-python3. 実行のための準備とその確認手順(Windows 前提)
3.1 プログラムファイルの準備
第5章のソースコードをテキストエディタ(Visual Studio Codeやメモ帳など)に貼り付け,main.py として保存する(文字コード:UTF-8).
3.2 実行コマンド
コマンドプロンプトでファイルの保存先ディレクトリに移動し,以下を実行する.
python main.py3.3 動作確認チェックリスト
| 確認項目 | 期待される結果 |
|---|---|
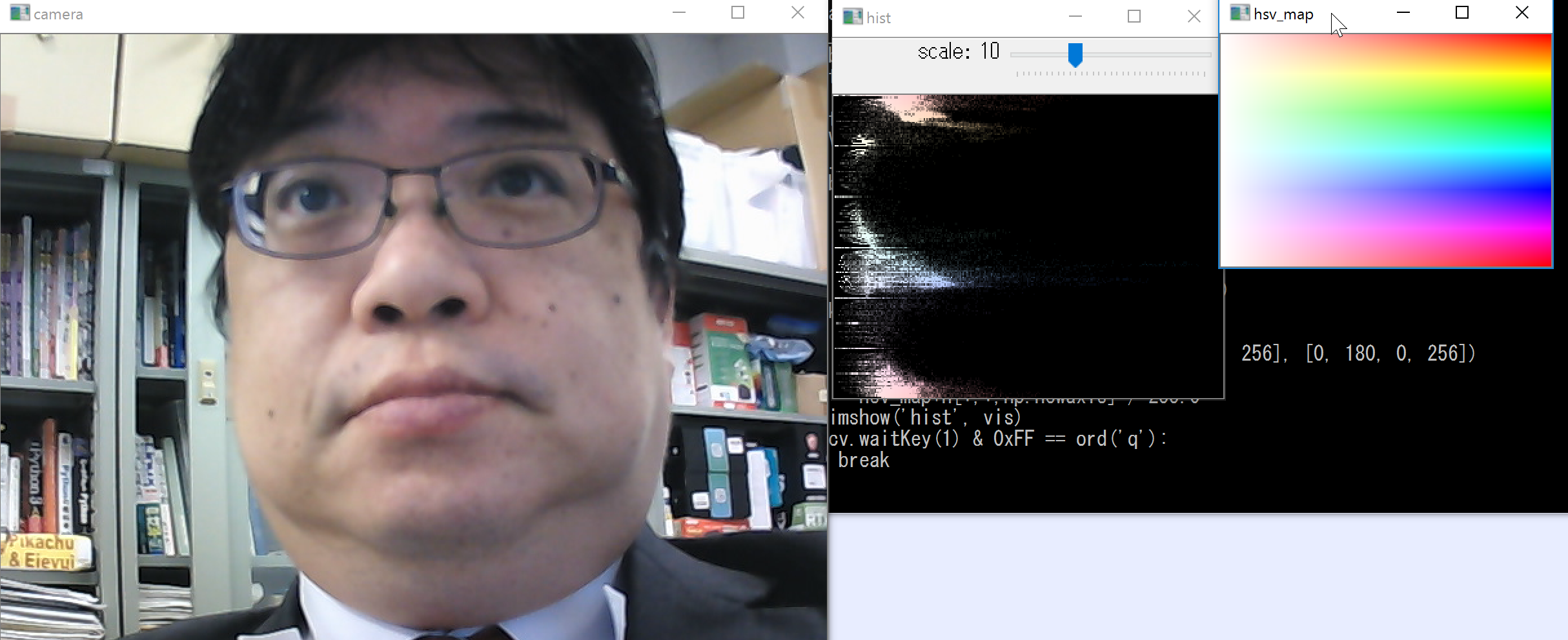
| プログラム起動時 | 「hsv_map」ウィンドウに HSV カラーマップが表示される |
| カメラ映像 | 「camera」ウィンドウにリアルタイム映像が表示される |
| ヒストグラム表示 | 「hist」ウィンドウに色相・彩度の2次元ヒストグラムが表示される |
| トラックバー操作 | 「scale」トラックバーでヒストグラムの表示スケール(0〜32)を調整できる |
| 暗部の除外 | 明度(V)が 32 未満の画素はヒストグラムから除外される |
| s キー押下 | capture_frame.png と capture_hist.png が保存される |
| q キー押下 | プログラムが終了し,すべてのウィンドウが閉じる |
4. 概要・使い方・実行上の注意
4.1 HSV カラーマップの生成
起動時に,色相 0〜179,彩度 0〜255 の HSV カラーマップ(180×256 ピクセル)を生成し,「hsv_map」ウィンドウに表示する.このカラーマップは,ヒストグラムの各ビン(区間)に色を対応付けるために使用する.
4.2 カメラ映像の取得とヒストグラムの算出
カメラ(デバイス番号 0)から取得したフレームを cv.pyrDown で縮小し,HSV 色空間に変換する.明度(V チャネル)が 32 未満の画素はヒストグラムの算出対象から除外する.cv.calcHist で色相・彩度の2次元ヒストグラムを算出し,スケール係数を乗じて HSV カラーマップと合成した結果を「hist」ウィンドウに表示する.
4.3 操作方法
「hist」ウィンドウの「scale」トラックバーで,ヒストグラムの表示スケール(0〜32)を調整できる.「s」キーを押すと,カメラフレームを capture_frame.png,ヒストグラム画像を capture_hist.png として保存する.「q」キーを押すとプログラムが終了する.
4.4 実行上の注意
本プログラムはカメラ(デバイス番号 0)を使用する.カメラが接続されていない場合,映像を取得できずプログラムは即座に終了する.
5. ソースコード
import numpy as np
import cv2 as cv
hsv_map = np.zeros((180, 256, 3), np.uint8)
h, s = np.indices(hsv_map.shape[:2])
hsv_map[:, :, 0] = h
hsv_map[:, :, 1] = s
hsv_map[:, :, 2] = 255
hsv_map = cv.cvtColor(hsv_map, cv.COLOR_HSV2BGR)
cv.imshow('hsv_map', hsv_map)
cv.namedWindow('hist', 0)
hist_scale = 10
def set_scale(val):
global hist_scale
hist_scale = val
cv.createTrackbar('scale', 'hist', hist_scale, 32, set_scale)
cap = cv.VideoCapture(0)
while True:
ret, bgr = cap.read()
if not ret:
break
cv.imshow('camera', bgr)
small = cv.pyrDown(bgr)
hsv = cv.cvtColor(small, cv.COLOR_BGR2HSV)
hsv[hsv[..., 2] < 32] = 0
h = cv.calcHist([hsv], [0, 1], None, [180, 256], [0, 180, 0, 256])
h = np.clip(h * 0.005 * hist_scale, 0, 1)
vis = hsv_map * h[:, :, np.newaxis] / 255.0
cv.imshow('hist', vis)
# 's' キーで現在のフレームとヒストグラムを画像ファイルとして保存
key = cv.waitKey(1) & 0xFF
if key == ord('q'):
break
elif key == ord('s'):
cv.imwrite('capture_frame.png', bgr)
cv.imwrite('capture_hist.png', (vis * 255).astype(np.uint8))
cap.release()
cv.destroyAllWindows()
6. まとめ
HSV 色空間への変換
BGR 形式のカメラ映像を HSV 色空間へ変換し,色相と彩度に基づくヒストグラムの算出を可能にする.
2次元カラーヒストグラムの可視化
cv.calcHist で色相・彩度の2次元ヒストグラムを算出し,HSV カラーマップと合成して可視化する.トラックバーで表示スケールをリアルタイムに調整できる.
暗部画素の除外
明度が 32 未満の画素をヒストグラムから除外し,ノイズの影響を抑えた色分布の把握を可能にする.
リアルタイム処理
cv.pyrDown によるフレーム縮小を経て,カメラ映像からリアルタイムにヒストグラムを算出・表示する.
スクリーンショット保存
「s」キーの押下で,カメラフレームとヒストグラム画像をファイルに保存する.