OpenCV で濃淡画像を使う(イメージヒストグラム,ヒストグラム平坦化,ノイズ除去,2値化,輪郭抽出)(OpenCV,Python を使用)
1. エグゼクティブサマリー
ねらい:OpenCV を用いて,コンピュータビジョンの基本を体験し演習する.
本記事では,OpenCV と Python を使用し,濃淡画像に対する基本的な画像処理を扱う.カラー画像から濃淡画像への変換,イメージヒストグラムの表示,ヒストグラム平坦化(equalizeHist および CLAHE),ノイズの付加と除去(Non-local Means Denoising),OTSU の方法による2値化,輪郭抽出(findContours),トラッキングポイント検出(Shi-Tomasi の手法)を,fruits.jpg および home.jpg の2枚のサンプル画像を用いて実行し,結果を Matplotlib でプロットして確認する.
【目次】
【関連する外部ページ】
- OpenCV の公式ページ: https://opencv.org
- GitHub の OpenCV のページ: https://github.com/opencv/opencv/releases
【サイト内の関連ページ】
- OpenCV について [PDF] , [パワーポイント]
- OpenCV と Python を活用した画像・ビデオ処理プログラム: 別ページ »
2. 前準備(必要ソフトウェアの入手)
ここでは、最低限の事前準備について説明する。機械学習や深層学習を行う場合は、NVIDIA CUDA、Visual Studio、Cursorなどを追加でインストールすると便利である。これらについては別ページ https://www.kkaneko.jp/cc/dev/aiassist.htmlで詳しく解説しているので、必要に応じて参照してください。
Python 3.12 のインストール
Pythonのインストールを行い、Pythonのプログラムを実行する環境を整える。扱う環境は、Windows搭載パソコンである。金子研究室では、Python 3.12.10を推奨する。
[Windows での Python 3.12 のインストール手順を見るには、ここをクリック]
Windows での Python 3.12 のインストール
以下のいずれかの方法でPython 3.12をインストールする。Pythonがインストール済みの場合、この手順は不要である。
方法 1:winget によるインストール
【インストールコマンドの実行方法】
管理者権限でコマンドプロンプトを起動する(手順:Windowsキーまたはスタートメニュー → cmd と入力 → 右クリック → 「管理者として実行」)。そして、コマンド全体をコマンドプロンプトにコピー&ペーストする。
--scope machine を指定することで、システム全体(全ユーザー向け)にインストールされる。このオプションの実行には管理者権限が必要である。インストール完了後、コマンドプロンプトを再起動するとPATHが反映される。
REM Python 3.12 をシステム領域にインストール
winget install --id Python.Python.3.12 -e --scope machine --silent --accept-source-agreements --accept-package-agreements --override "/quiet InstallAllUsers=1 PrependPath=1 Include_test=0 Include_pip=1 Include_launcher=1 InstallLauncherAllUsers=1 TargetDir=\"C:\Program Files\Python312\""
REM Python と Scripts を PATH 先頭に追加
powershell -NoProfile -Command "$p='C:\Program Files\Python312'; $s=\"$p\Scripts\"; $c=[Environment]::GetEnvironmentVariable('Path','Machine'); if((Test-Path $p) -and (';'+$c+';' -notlike \"*;$p;*\") -and (';'+$c+';' -notlike \"*;$s;*\")){[Environment]::SetEnvironmentVariable('Path',\"$p;$s;$c\",'Machine')}"
方法 2:インストーラーによるインストール
- Python公式サイト(https://www.python.org/downloads/)にアクセスし、「Download Python 3.x.x」ボタンからWindows用インストーラーをダウンロードする。
- ダウンロードしたインストーラーを実行する。
- 初期画面の下部に表示される「Add python.exe to PATH」にチェックを入れてから「Customize installation」を選択する。このチェックを入れ忘れると、コマンドプロンプトから
pythonコマンドを実行できない。 - 「Install Python 3.xx for all users」にチェックを入れ、「Install」をクリックする。
インストールの確認
コマンドプロンプトで以下を実行する。
python --versionバージョン番号(例:Python 3.12.x)が表示されればインストール成功である。「'python' は、内部コマンドまたは外部コマンドとして認識されていません。」と表示される場合は、インストールが正常に完了していない。
Python の開発環境 Visual Studio Code のインストールと Python 用の設定
Python の開発環境Visual Studio Code(プログラムを編集するソフトウェア。以下、VS Code)を整える。
[Windows での Visual Studio Code のインストールと Python 用の設定手順を見るには、ここをクリック]
Windows での Visual Studio Code のインストールと Python 用の設定手順
1. VS Code と拡張機能のインストール
以下のコマンドにより,既存の VS Code を削除し,全ユーザー共有の設定で再インストールしたうえで,拡張機能(VS Code に機能を追加するソフトウェア)をまとめて導入する.
【インストールコマンドの実行方法】
管理者権限でコマンドプロンプトを起動する(手順:Windows キーまたはスタートメニュー → cmd と入力 → 右クリック → 「管理者として実行」)。そして,コマンド全体をコマンドプロンプトにコピー&ペーストする。
インストールコマンド
REM ============================================================
REM Microsoft Visual Studio Code
REM ============================================================
winget uninstall -e --id Microsoft.VisualStudioCode --silent --disable-interactivity --accept-source-agreements
rmdir /s /q C:\ProgramData\vscode-extensions 2>nul
rmdir /s /q "%APPDATA%\Code" 2>nul
rmdir /s /q "%USERPROFILE%\.vscode" 2>nul
rmdir /s /q "%LOCALAPPDATA%\Microsoft\vscode-update" 2>nul
REM VS Code をシステム領域に新規インストール
winget install --scope machine --id Microsoft.VisualStudioCode -e --silent --accept-source-agreements --accept-package-agreements
REM 全ユーザー共有の拡張機能フォルダ
mkdir C:\ProgramData\vscode-extensions 2>nul
icacls "C:\ProgramData\vscode-extensions" /grant "Everyone:(OI)(CI)M" /T
REM スタートメニューのショートカットを --extensions-dir 付きで再作成
rmdir /s /q "C:\ProgramData\Microsoft\Windows\Start Menu\Programs\Visual Studio Code" 2>nul
del "C:\ProgramData\Microsoft\Windows\Start Menu\Programs\Visual Studio Code.lnk" 2>nul
powershell -NoProfile -Command "$s=New-Object -ComObject WScript.Shell; $lnk=$s.CreateShortcut('C:\ProgramData\Microsoft\Windows\Start Menu\Programs\Visual Studio Code.lnk'); $lnk.TargetPath='C:\Program Files\Microsoft VS Code\Code.exe'; $lnk.Arguments='--extensions-dir \"C:\ProgramData\vscode-extensions\"'; $lnk.Save()"
REM ショートカットの検証
powershell -NoProfile -Command "$s=New-Object -ComObject WScript.Shell; $lnk=$s.CreateShortcut('C:\ProgramData\Microsoft\Windows\Start Menu\Programs\Visual Studio Code.lnk'); Write-Host 'TargetPath:' $lnk.TargetPath; Write-Host 'Arguments:' $lnk.Arguments"
REM ファイル / フォルダ右クリックの「Code で開く」を登録
reg add "HKLM\SOFTWARE\Classes\*\shell\VSCode\command" /ve /d "\"C:\Program Files\Microsoft VS Code\Code.exe\" --extensions-dir \"C:\ProgramData\vscode-extensions\" \"%1\"" /f
reg add "HKLM\SOFTWARE\Classes\Directory\shell\VSCode\command" /ve /d "\"C:\Program Files\Microsoft VS Code\Code.exe\" --extensions-dir \"C:\ProgramData\vscode-extensions\" \"%1\"" /f
reg add "HKLM\SOFTWARE\Classes\Directory\Background\shell\VSCode\command" /ve /d "\"C:\Program Files\Microsoft VS Code\Code.exe\" --extensions-dir \"C:\ProgramData\vscode-extensions\" \"%V\"" /f
REM --extensions-dir 付きで起動する code.cmd ラッパを作成
REM (%* を echo で書くと対話的 cmd で失われるため、PowerShell で [char]37+'*' を書き出す)
powershell -NoProfile -Command "$pct=[char]37; $q=[char]34; $c='@echo off'+[char]13+[char]10+$q+'C:\Program Files\Microsoft VS Code\bin\code.cmd'+$q+' --extensions-dir '+$q+'C:\ProgramData\vscode-extensions'+$q+' '+$pct+'*'+[char]13+[char]10; [IO.File]::WriteAllText('C:\ProgramData\vscode-extensions\vscode.cmd',$c,[Text.Encoding]::ASCII)"
REM 拡張機能のインストール
set "CODE=C:\Program Files\Microsoft VS Code\bin\code.cmd"
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --uninstall-extension GitHub.copilot
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --uninstall-extension GitHub.copilot-chat
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --install-extension ms-python.python
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --install-extension ms-python.vscode-pylance
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --install-extension ms-python.debugpy
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --install-extension MS-CEINTL.vscode-language-pack-ja
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --install-extension saoudrizwan.claude-dev
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --install-extension rust-lang.rust-analyzer
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --install-extension tamasfe.even-better-toml
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --install-extension anthropic.claude-code
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --install-extension almenon.arepl
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --list-extensions --show-versions
echo === セットアップ完了 ===
2. Python インタプリタの選択
同一マシンに複数の Python がインストールされている場合,VS Code で使用する Python 本体(インタプリタ:Python プログラムを解釈・実行するソフトウェア)を選択する必要がある.
- コマンドパレット(コマンド名で機能を呼び出す VS Code の入力欄)を開く(
Ctrl+Shift+P) Python: Select Interpreterと入力する
- 表示される一覧から,使用する Python(例:
C:\Program Files\Python312\python.exe)を選択する.
必要なライブラリのインストール [クリックして展開]
管理者権限のコマンドプロンプトで以下を実行する。管理者権限のコマンドプロンプトを起動するには、Windows キーまたはスタートメニューから「cmd」と入力し、表示された「コマンドプロンプト」を右クリックして「管理者として実行」を選択する。
python -m pip install -U opencv-python opencv-contrib-python numpy matplotlib
3. 実行のための準備とその確認手順(Windows 前提)
3.1 プログラムファイルの準備
第5章の各プログラムを実行。Windows のローカル実行の場合は「%matplotlib inline」の行は不要。
サンプル画像として fruits.jpg と home.jpg を事前にダウンロードしておく.
3.1.1 画像ファイル fruits.jpg, home.jpg のダウンロード
{kind=link}
- Windows の場合
次のコマンドを実行.
cd /d c:%HOMEPATH% curl -L https://github.com/opencv/opencv/blob/master/samples/data/fruits.jpg?raw=true -o fruits.jpg curl -O https://raw.githubusercontent.com/opencv/opencv/master/samples/data/home.jpg - Google Colaboratory の場合
次のコマンドを実行.
curl -L https://github.com/opencv/opencv/blob/master/samples/data/fruits.jpg?raw=true -o fruits.jpg curl -O https://raw.githubusercontent.com/opencv/opencv/master/samples/data/home.jpg
3.2 実行コマンド
Windows の場合,コマンドプロンプトで以下を実行し,Jupyter Qt Console を起動する.
jupyter qtconsole
Jupyter Qt Console が起動したら,第5章の各コードブロックをセルに貼り付けて実行する.
3.3 動作確認チェックリスト
| 確認項目 | 期待される結果 |
|---|---|
| Jupyter Qt Console の起動 | jupyter qtconsole 実行後,ウィンドウが表示される |
| カラー画像から濃淡画像への変換 | カラー画像と濃淡画像がそれぞれプロットされる |
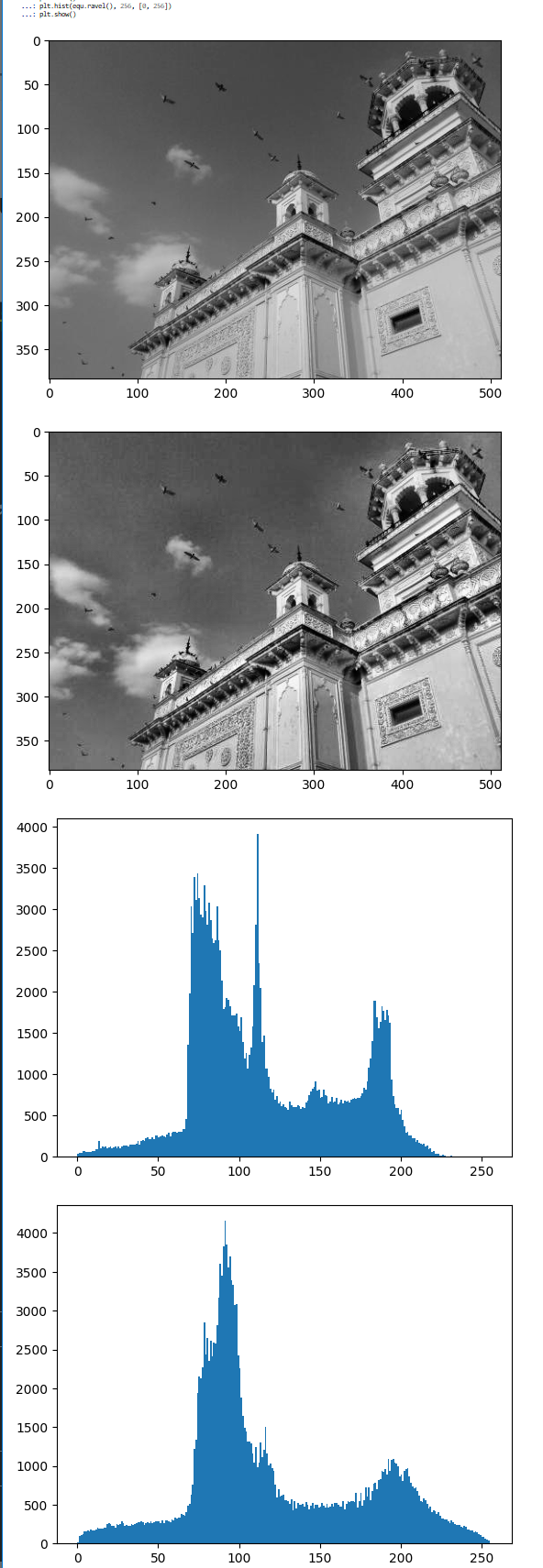
| イメージヒストグラムの表示 | 濃淡画像と,横軸が明るさ・縦軸が画素数のヒストグラムがプロットされる |
| ヒストグラム平坦化(equalizeHist) | 平坦化前後の画像とヒストグラムがプロットされ,平坦化後の分布が均一に近づく |
| CLAHE によるヒストグラム平坦化 | CLAHE 適用前後の画像とヒストグラムがプロットされる |
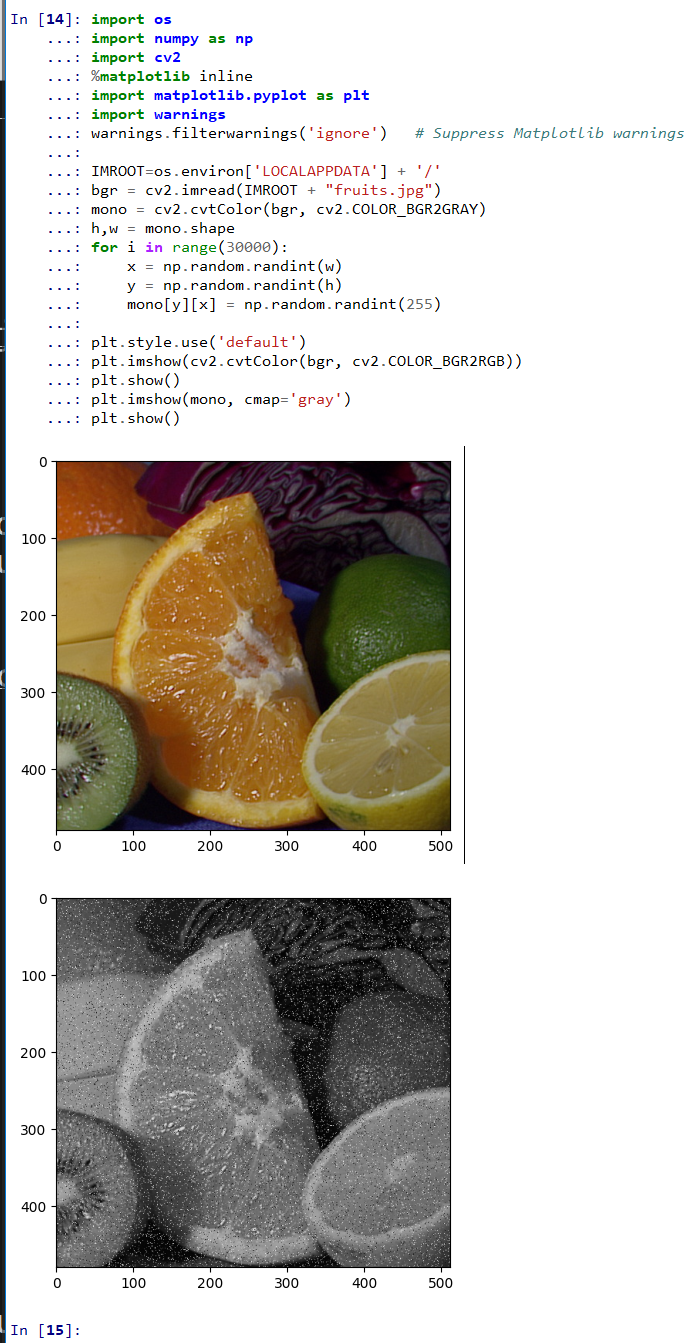
| ノイズの付加 | ノイズが付加された濃淡画像がプロットされる |
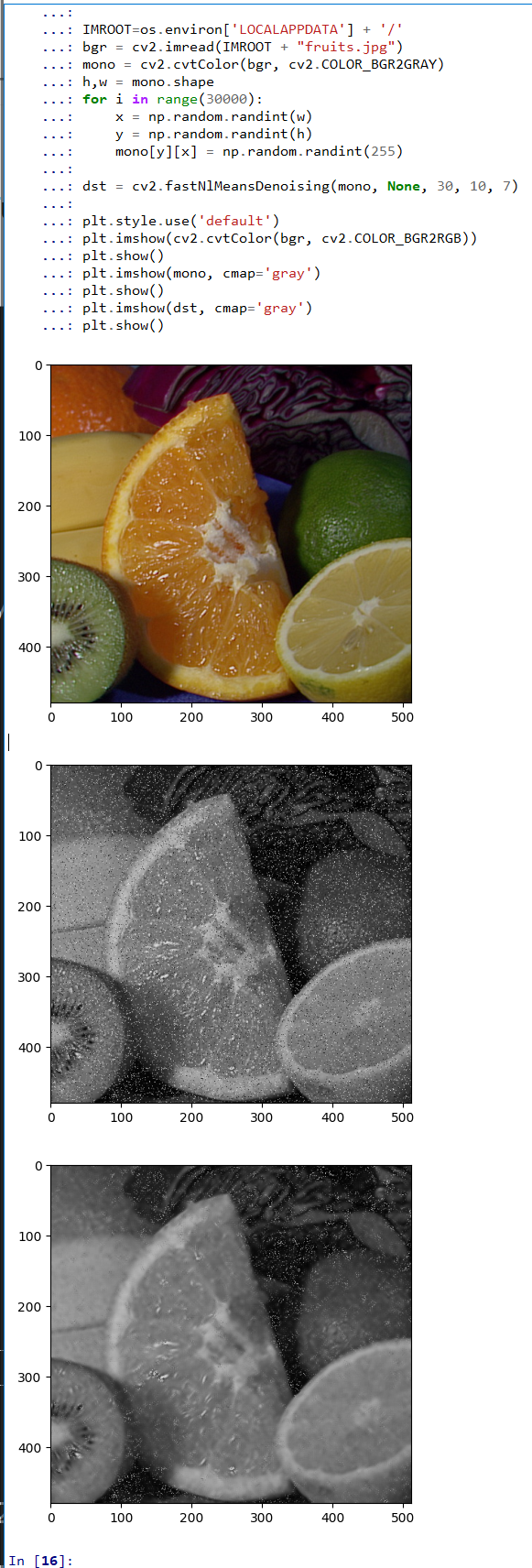
| ノイズ除去 | ノイズ付加後の画像と除去後の画像がプロットされ,ノイズが軽減されている |
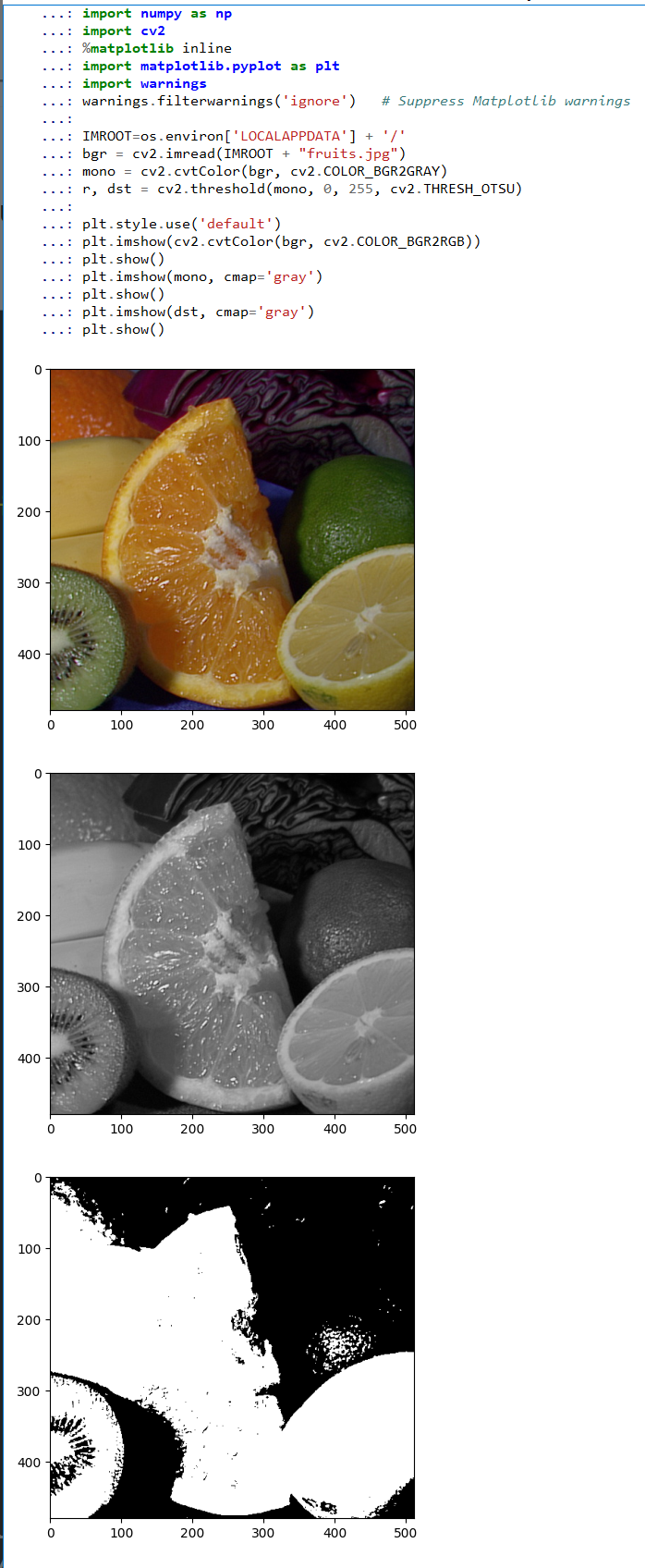
| OTSU の方法による2値化 | 2値化画像がプロットされ,OTSU 閾値がタイトルに表示される |
| 輪郭抽出 | 抽出された輪郭が緑色の線でカラー画像上に描画される |
| トラッキングポイント | 検出されたトラッキングポイントが白い円で描画される |
4. 概要・使い方・実行上の注意
4.1 環境別の IMROOT 設定
第5章の各コードでは,画像ファイルの格納先を変数 IMROOT で指定している.環境に応じて以下のように書き換えること.
Google Colaboratory のときは,「IMROOT=os.environ['LOCALAPPDATA'] + '/'」の行を,「IMROOT="./"」のように書き換える.
4.2 カラー画像から濃淡画像への変換
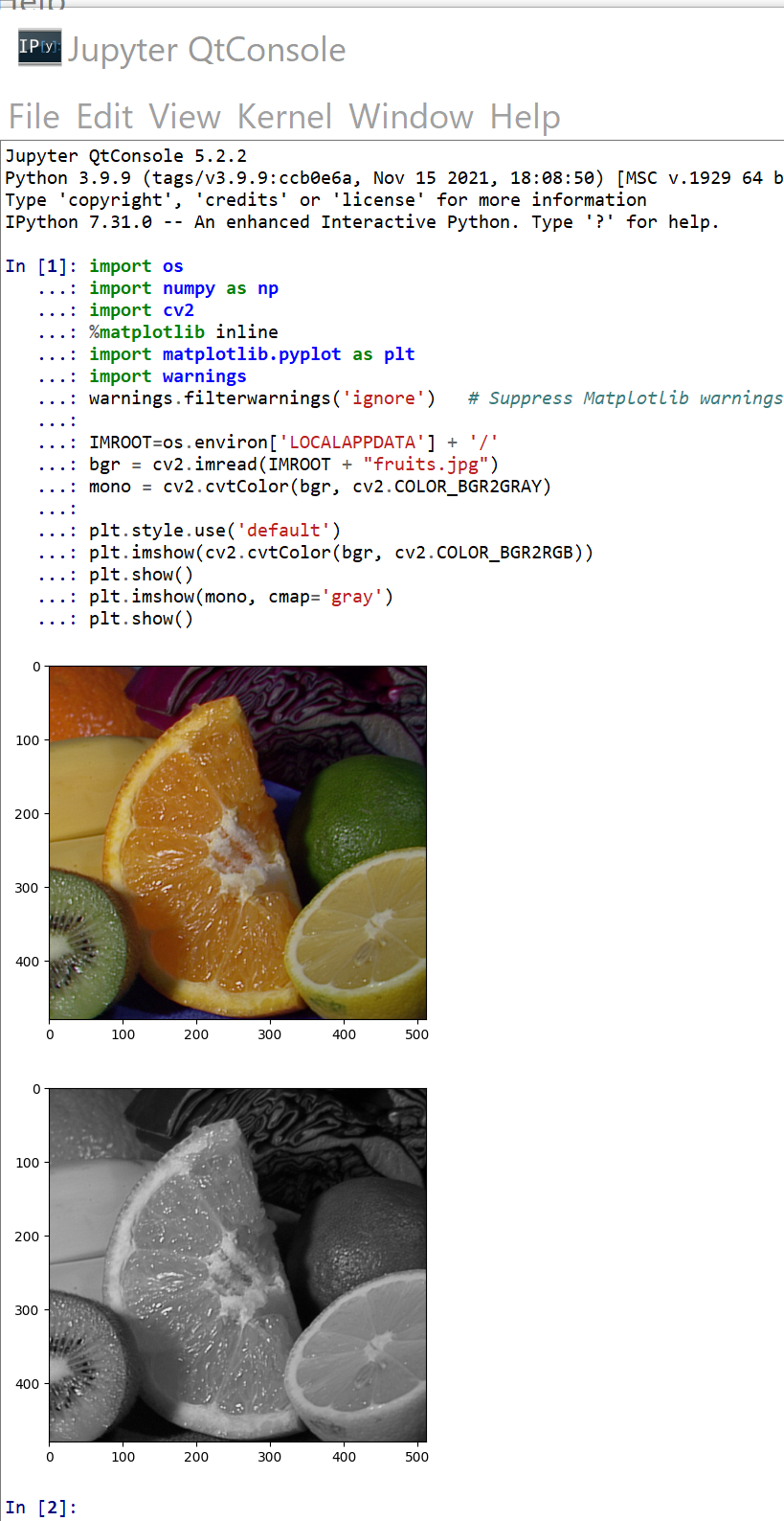
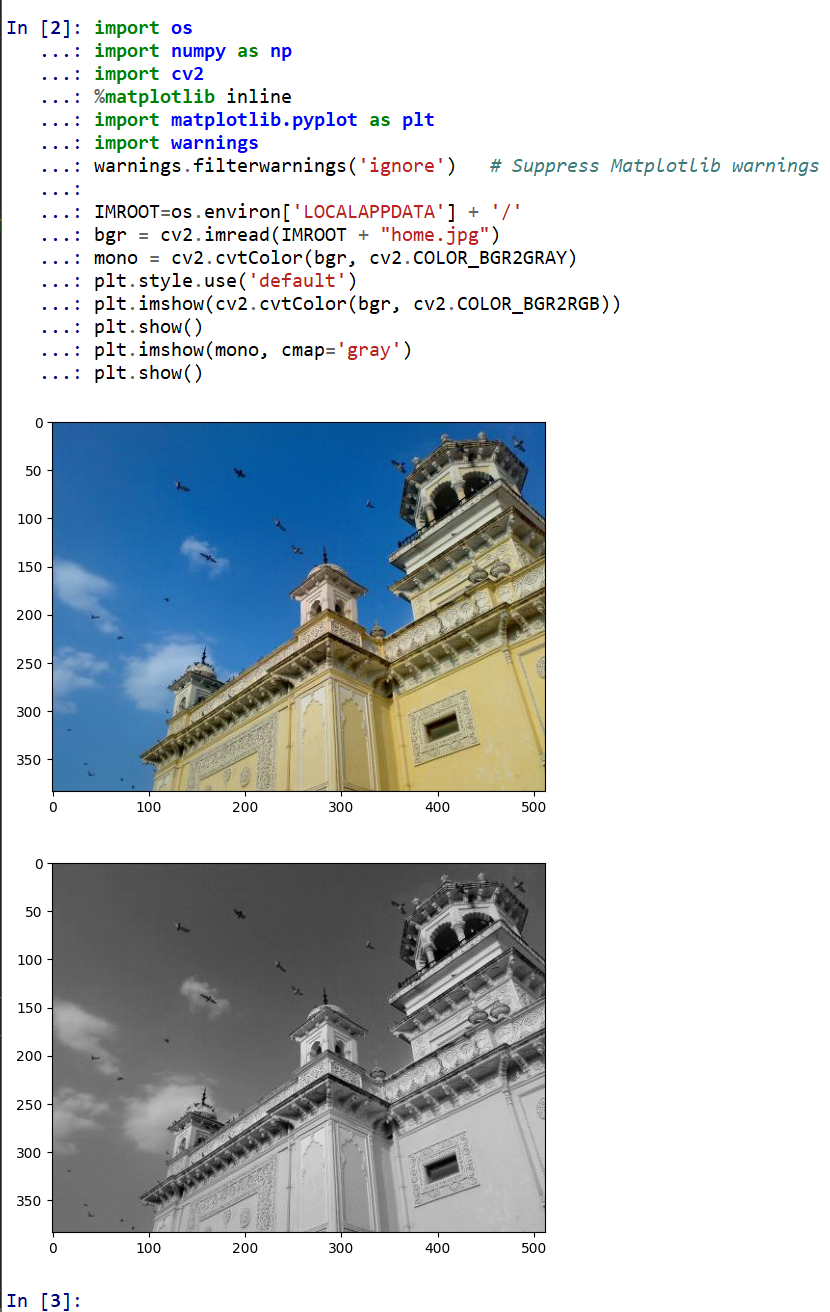
cv2.cvtColor に cv2.COLOR_BGR2GRAY を指定し,BGR 形式のカラー画像を濃淡画像に変換する.Matplotlib で表示する際,カラー画像は BGR から RGB に変換して plt.imshow に渡し,濃淡画像は cmap='gray' を指定する.
4.3 イメージヒストグラム
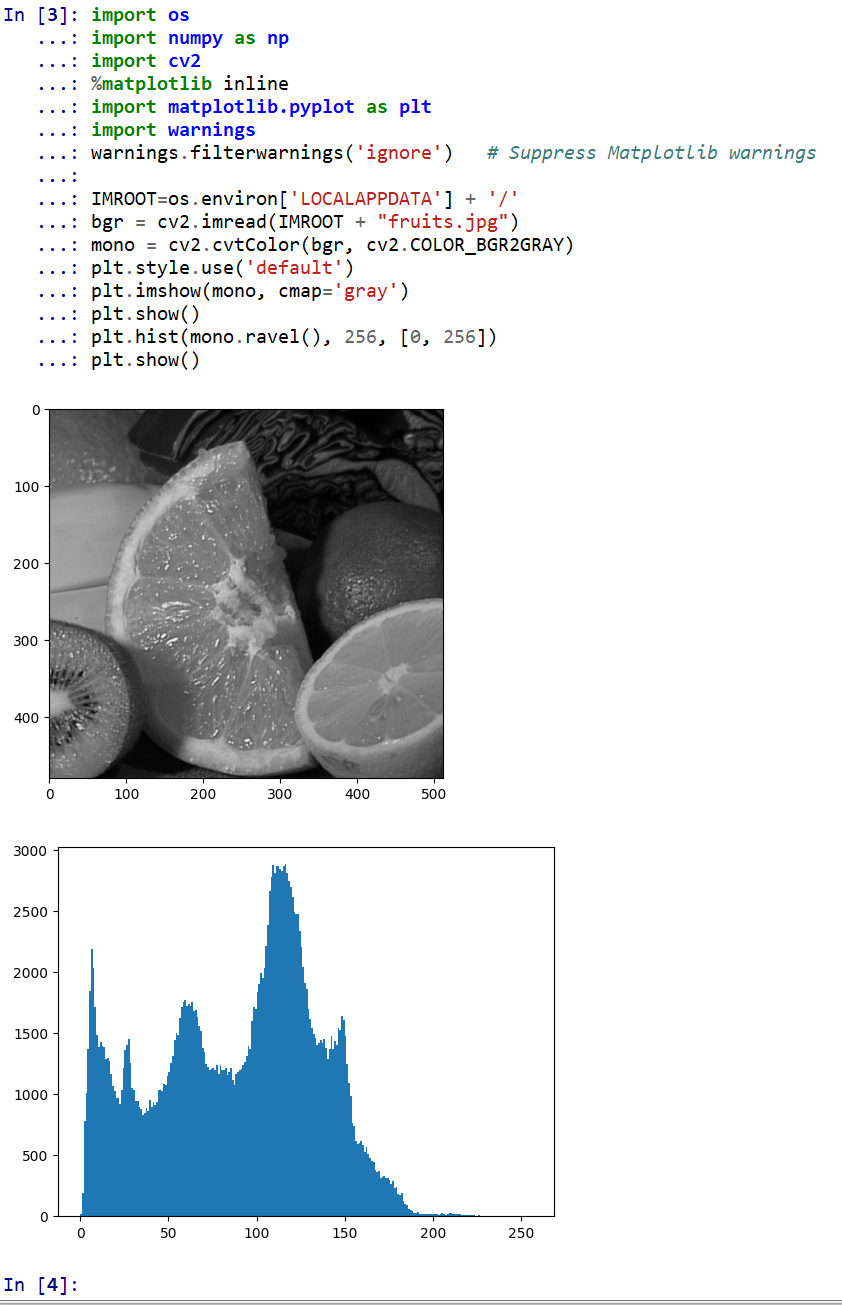
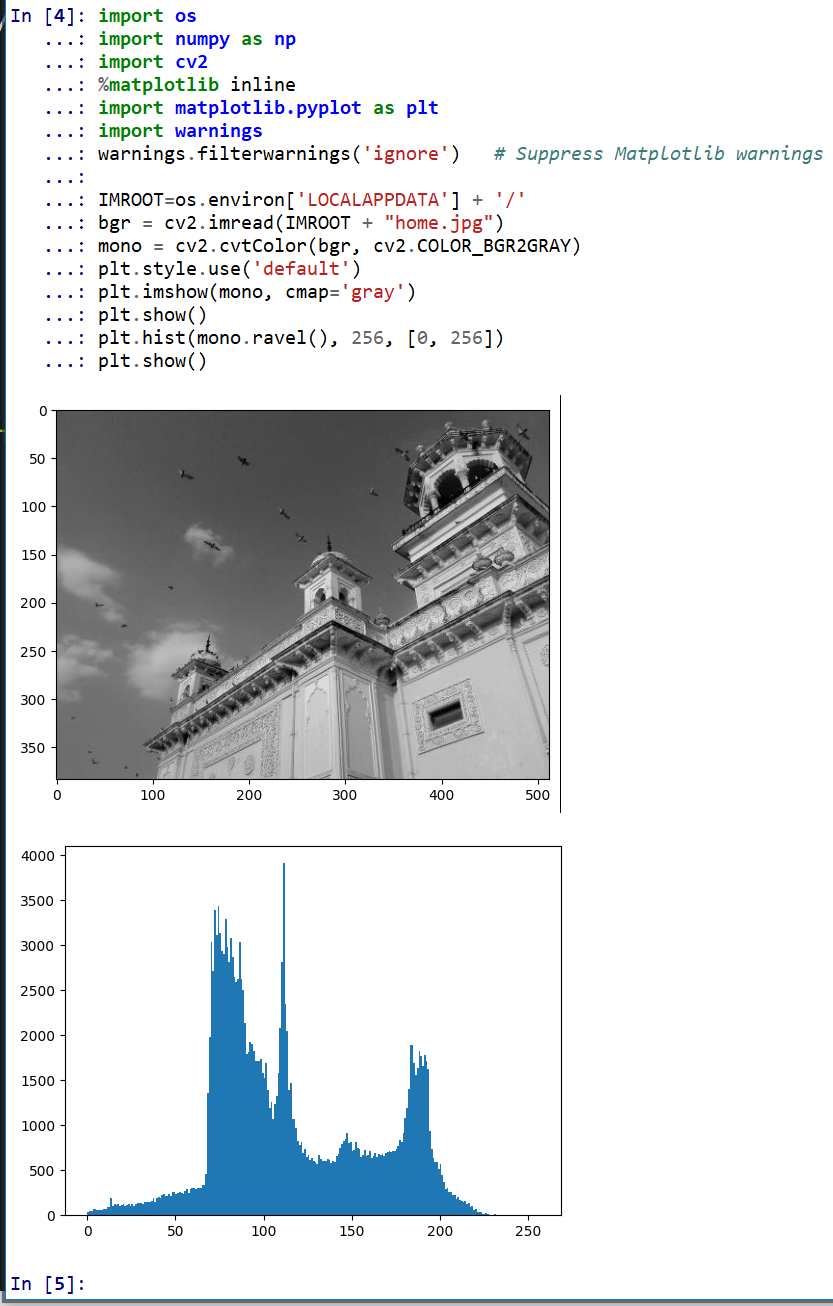
イメージヒストグラムは,画素の明るさによるヒストグラムである.横軸が明るさ(右に行くほど明るい),縦軸が画素数を表す.
4.4 ヒストグラム平坦化 (histogram equalization)
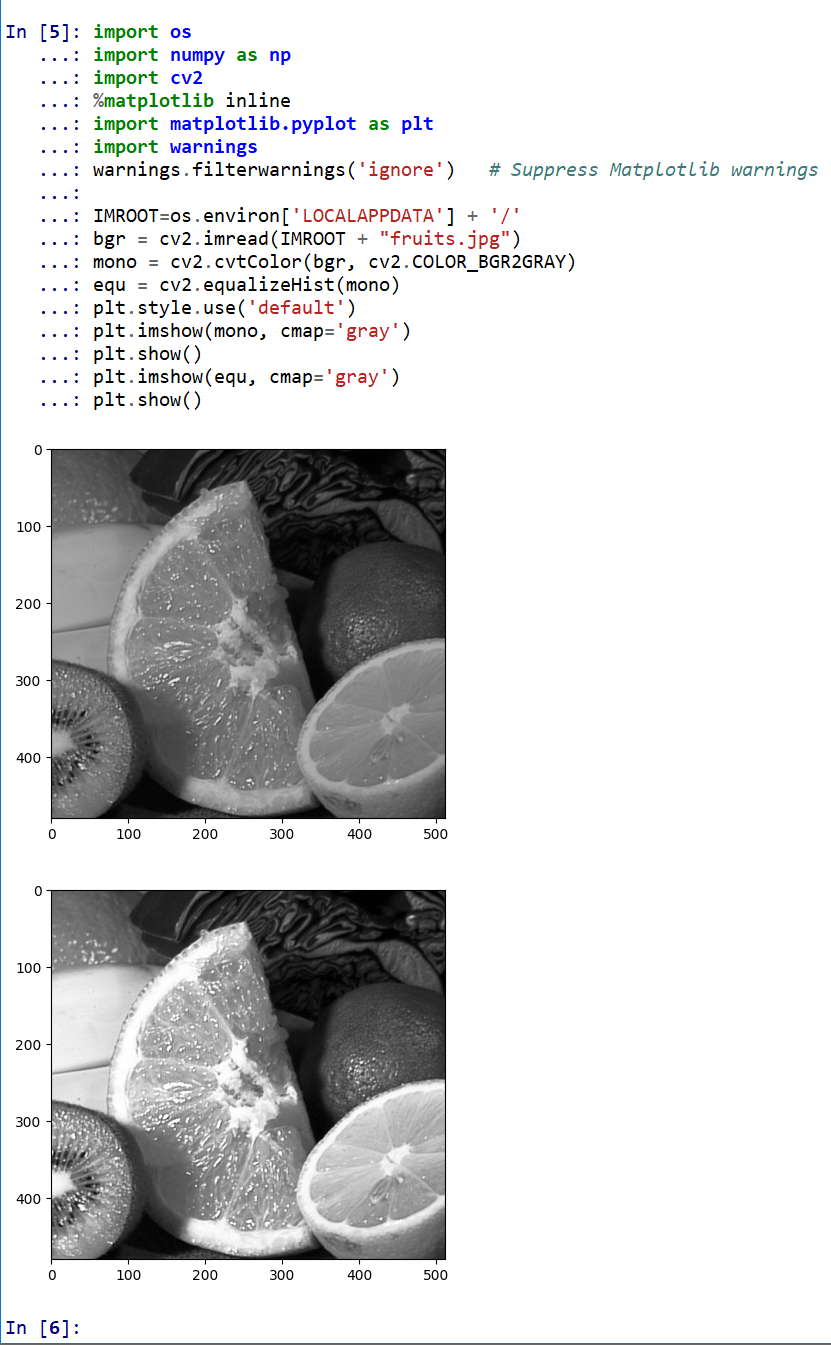
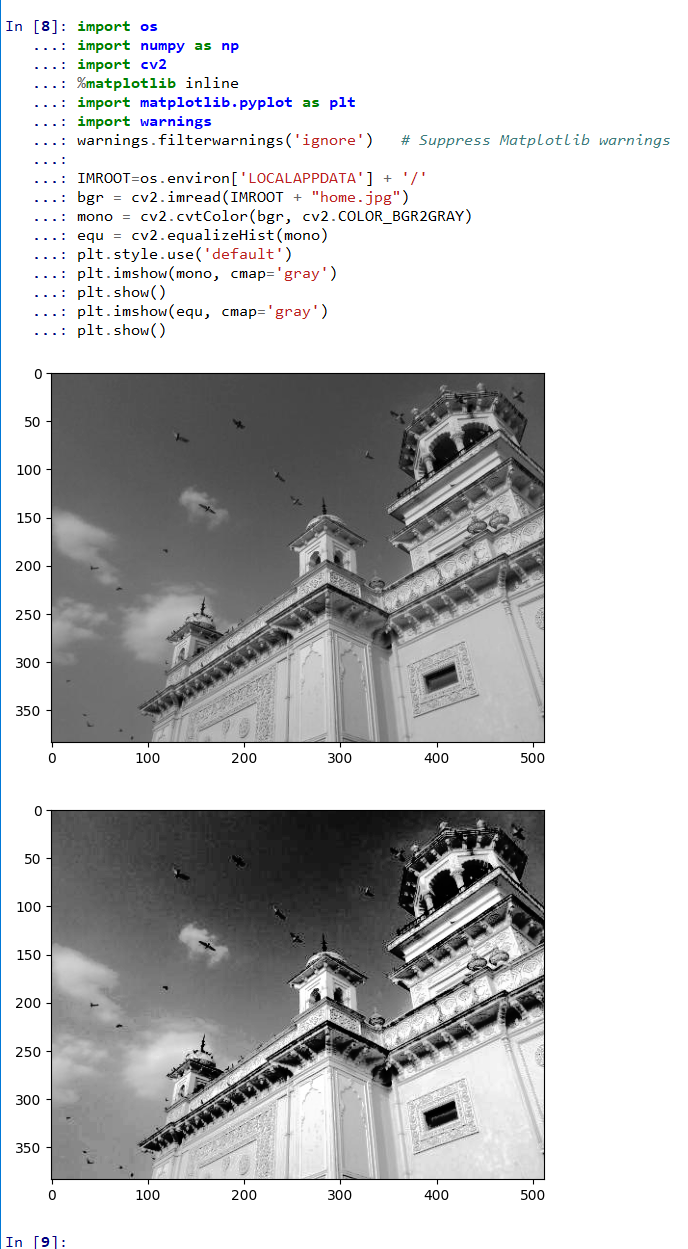
ヒストグラム平坦化は,モノクロ画像のコントラストを改善する手法である.イメージヒストグラムが平坦化するように,画素の輝度を調整する.
4.5 CLAHE (Contrast Limited Adaptive Histogram Equalization)
CLAHE は,輪郭線が残りやすいヒストグラム平坦化の手法である.cv2.createCLAHE で clipLimit および tileGridSize を指定する.
4.6 ノイズの付加と除去
乱数で画素値をランダムに書き換えてノイズを付加する.ノイズ除去には,濃淡画像には cv2.fastNlMeansDenoising,カラー画像には cv2.fastNlMeansDenoisingColored,ビデオには cv2.fastNlMeansDenoisingMulti を使う.
4.7 OTSU の方法による2値化
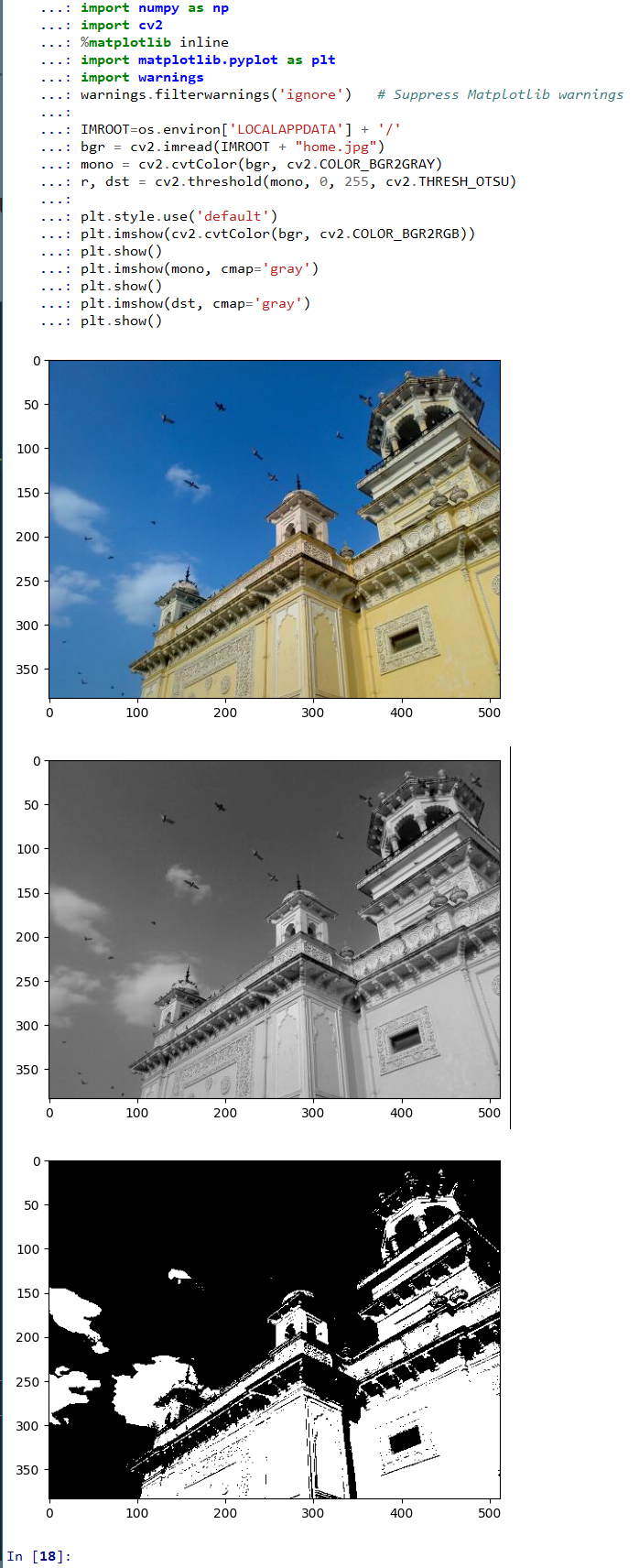
2値化は,全ての画素を2値に変換する処理である.cv2.threshold に cv2.THRESH_OTSU を指定し,閾値を自動決定する.2値化画像は白と黒で表示する.
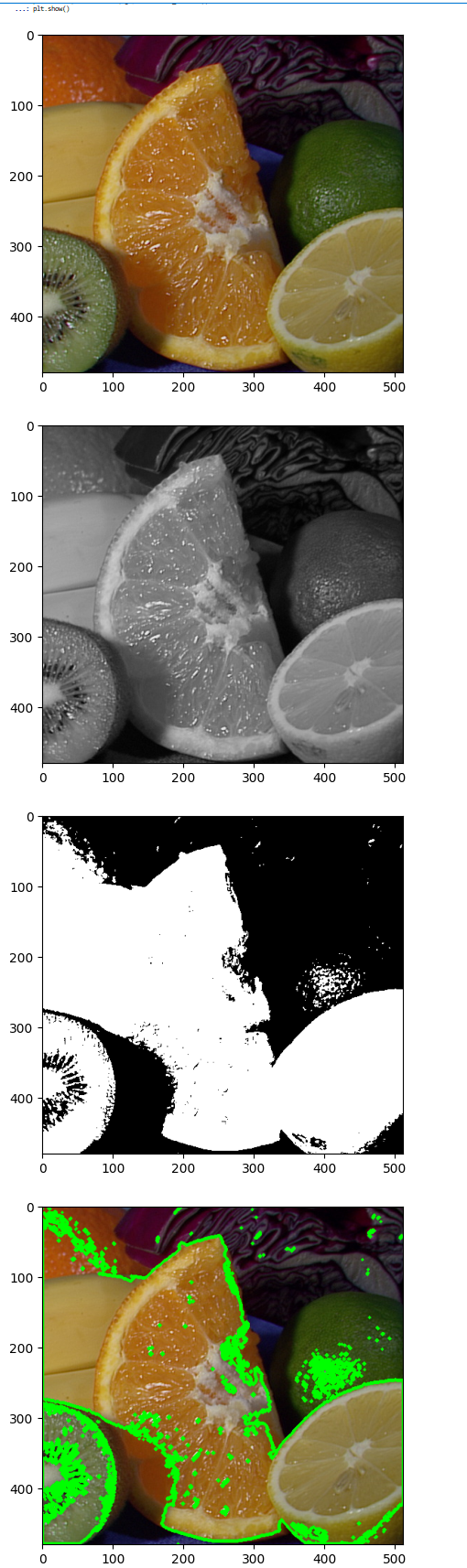
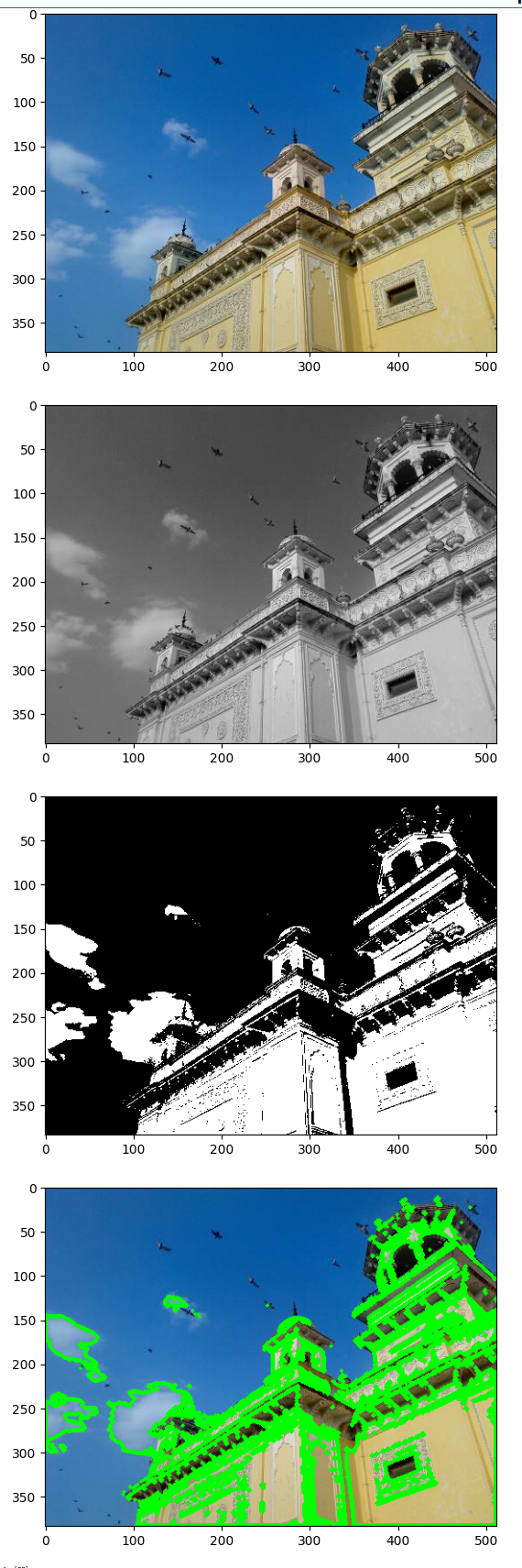
4.8 輪郭抽出
2値化の結果を利用して輪郭を抽出する.OpenCV 4 では「contours, hierarchy = cv2.findContours ...」を使う.OpenCV 3 では「image, contours, hierarchy = cv2.findContours」を使う.cv2.drawContours で輪郭を画像上に描画する.
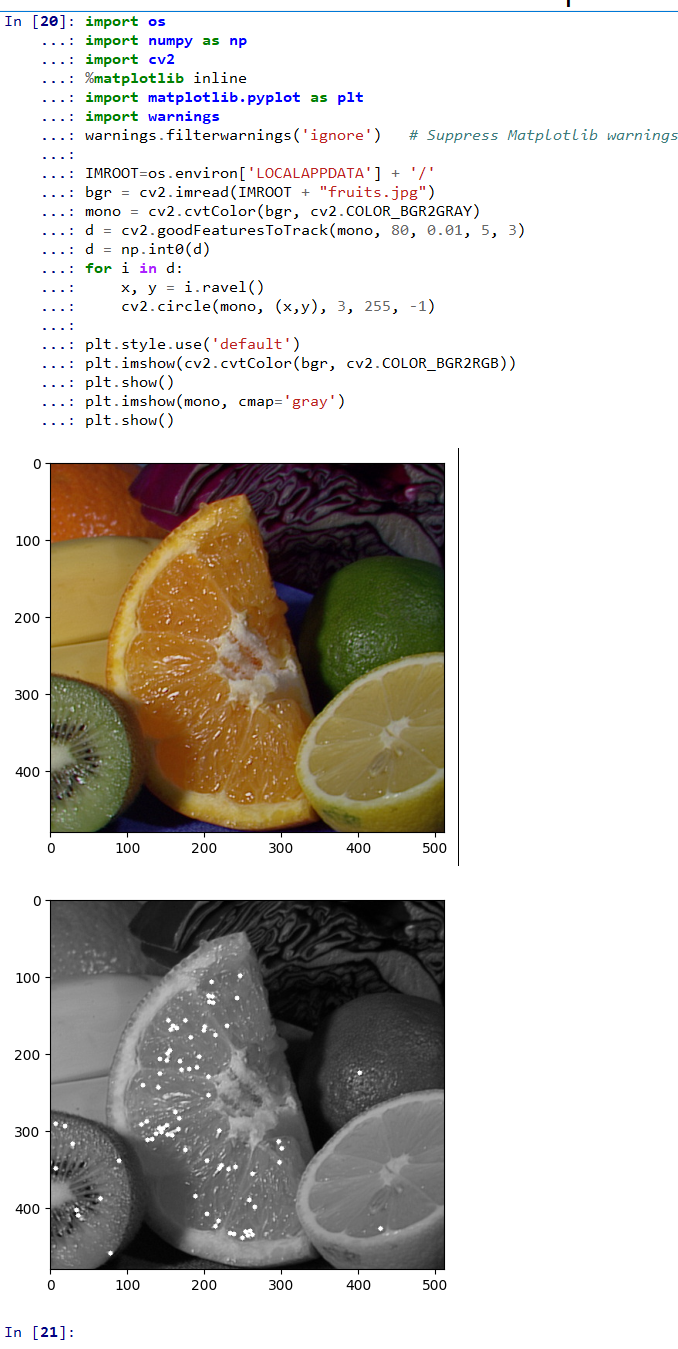
4.9 トラッキングポイント(Shi-Tomasi の手法)
cv2.goodFeaturesToTrack で Shi-Tomasi の手法によるコーナー検出を行う.検出された点を cv2.circle で画像上に描画する.
5. ソースコード
5.1 カラー画像から濃淡画像への変換
5.1.1 fruits.jpg での実行
import os
import numpy as np
import cv2
%matplotlib inline
import matplotlib.pyplot as plt
IMROOT=os.environ['LOCALAPPDATA'] + '/'
bgr = cv2.imread(IMROOT + "fruits.jpg")
mono = cv2.cvtColor(bgr, cv2.COLOR_BGR2GRAY)
plt.style.use('default')
plt.imshow(cv2.cvtColor(bgr, cv2.COLOR_BGR2RGB))
plt.axis('off')
plt.show()
plt.imshow(mono, cmap='gray')
plt.axis('off')
plt.show()
5.1.2 home.jpg での実行
import os
import numpy as np
import cv2
%matplotlib inline
import matplotlib.pyplot as plt
IMROOT=os.environ['LOCALAPPDATA'] + '/'
bgr = cv2.imread(IMROOT + "home.jpg")
mono = cv2.cvtColor(bgr, cv2.COLOR_BGR2GRAY)
plt.style.use('default')
plt.imshow(cv2.cvtColor(bgr, cv2.COLOR_BGR2RGB))
plt.axis('off')
plt.show()
plt.imshow(mono, cmap='gray')
plt.axis('off')
plt.show()
5.2 イメージヒストグラム
5.2.1 fruits.jpg でのヒストグラム
import os
import numpy as np
import cv2
%matplotlib inline
import matplotlib.pyplot as plt
IMROOT=os.environ['LOCALAPPDATA'] + '/'
bgr = cv2.imread(IMROOT + "fruits.jpg")
mono = cv2.cvtColor(bgr, cv2.COLOR_BGR2GRAY)
plt.style.use('default')
plt.imshow(mono, cmap='gray')
plt.axis('off')
plt.show()
plt.hist(mono.ravel(), 256, [0, 256])
plt.show()
ヒストグラムが表示されるので確認する.
5.2.2 home.jpg でのヒストグラム
import os
import numpy as np
import cv2
%matplotlib inline
import matplotlib.pyplot as plt
IMROOT=os.environ['LOCALAPPDATA'] + '/'
bgr = cv2.imread(IMROOT + "home.jpg")
mono = cv2.cvtColor(bgr, cv2.COLOR_BGR2GRAY)
plt.style.use('default')
plt.imshow(mono, cmap='gray')
plt.axis('off')
plt.show()
plt.hist(mono.ravel(), 256, [0, 256])
plt.show()
ヒストグラムが表示されるので確認する.
5.3 ヒストグラム平坦化 (histogram equalization)
5.3.1 fruits.jpg での平坦化(画像表示)
import os
import numpy as np
import cv2
%matplotlib inline
import matplotlib.pyplot as plt
IMROOT=os.environ['LOCALAPPDATA'] + '/'
bgr = cv2.imread(IMROOT + "fruits.jpg")
mono = cv2.cvtColor(bgr, cv2.COLOR_BGR2GRAY)
equ = cv2.equalizeHist(mono)
plt.style.use('default')
plt.imshow(mono, cmap='gray')
plt.axis('off')
plt.show()
plt.imshow(equ, cmap='gray')
plt.axis('off')
plt.show()
画像が表示されるので確認する.
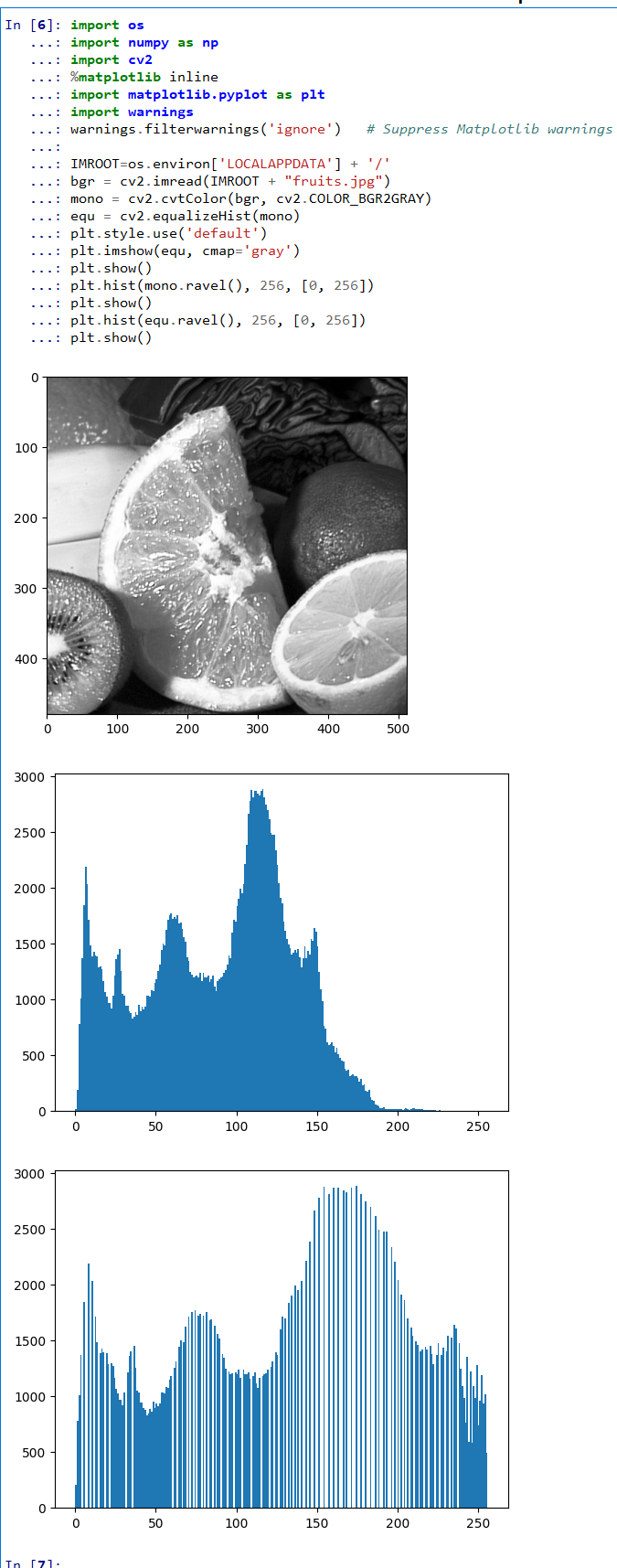
5.3.2 fruits.jpg での平坦化(ヒストグラム表示)
import os
import numpy as np
import cv2
%matplotlib inline
import matplotlib.pyplot as plt
IMROOT=os.environ['LOCALAPPDATA'] + '/'
bgr = cv2.imread(IMROOT + "fruits.jpg")
mono = cv2.cvtColor(bgr, cv2.COLOR_BGR2GRAY)
equ = cv2.equalizeHist(mono)
plt.style.use('default')
plt.imshow(equ, cmap='gray')
plt.axis('off')
plt.show()
plt.hist(mono.ravel(), 256, [0, 256])
plt.show()
plt.hist(equ.ravel(), 256, [0, 256])
plt.show()
ヒストグラムが表示されるので確認する.
5.3.3 home.jpg での平坦化(画像表示)
import os
import numpy as np
import cv2
%matplotlib inline
import matplotlib.pyplot as plt
IMROOT=os.environ['LOCALAPPDATA'] + '/'
bgr = cv2.imread(IMROOT + "home.jpg")
mono = cv2.cvtColor(bgr, cv2.COLOR_BGR2GRAY)
equ = cv2.equalizeHist(mono)
plt.style.use('default')
plt.imshow(mono, cmap='gray')
plt.axis('off')
plt.show()
plt.imshow(equ, cmap='gray')
plt.axis('off')
plt.show()
画像が表示されるので確認する.
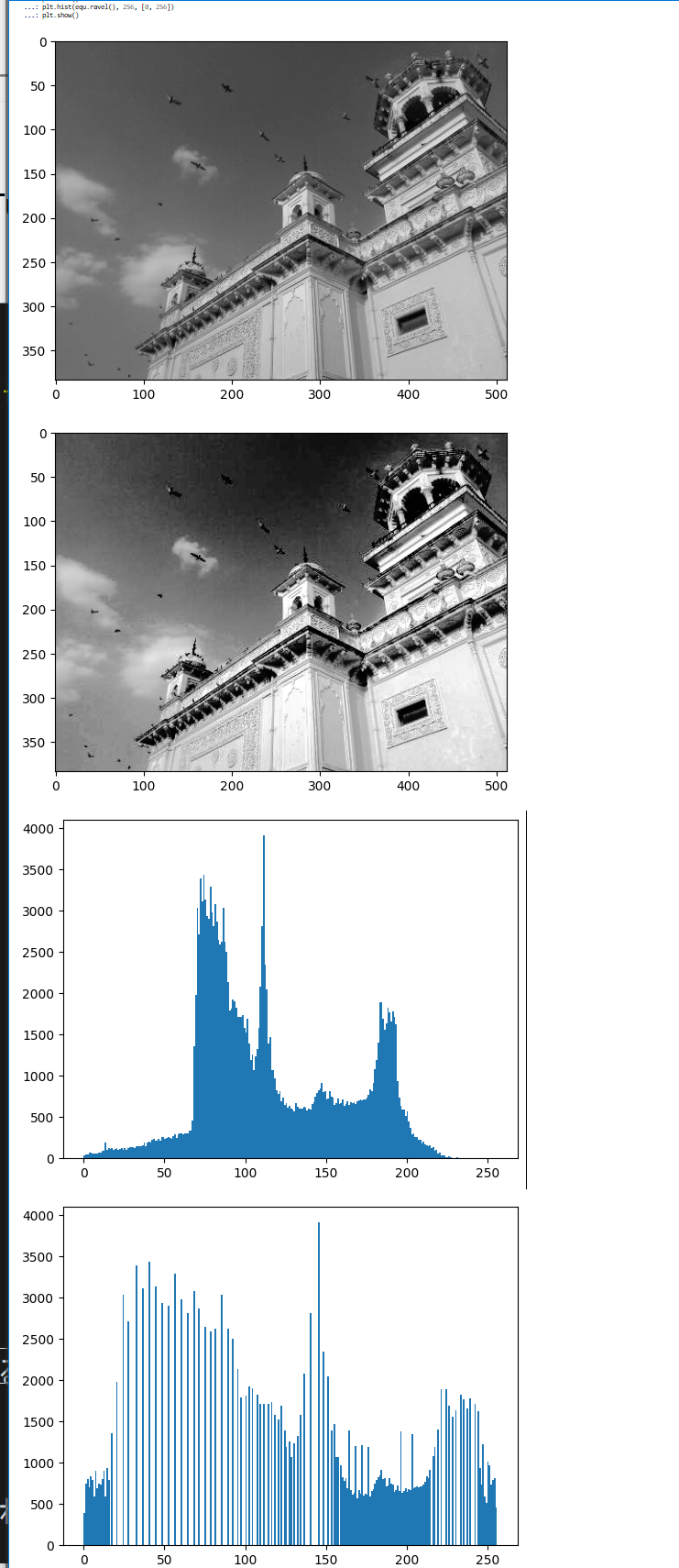
5.3.4 home.jpg での平坦化(ヒストグラム表示)
import os
import numpy as np
import cv2
%matplotlib inline
import matplotlib.pyplot as plt
IMROOT=os.environ['LOCALAPPDATA'] + '/'
bgr = cv2.imread(IMROOT + "home.jpg")
mono = cv2.cvtColor(bgr, cv2.COLOR_BGR2GRAY)
equ = cv2.equalizeHist(mono)
plt.style.use('default')
plt.imshow(mono, cmap='gray')
plt.axis('off')
plt.show()
plt.imshow(equ, cmap='gray')
plt.axis('off')
plt.show()
plt.hist(mono.ravel(), 256, [0, 256])
plt.show()
plt.hist(equ.ravel(), 256, [0, 256])
plt.show()
ヒストグラムが表示されるので確認する.
5.4 CLAHE によるヒストグラム平坦化
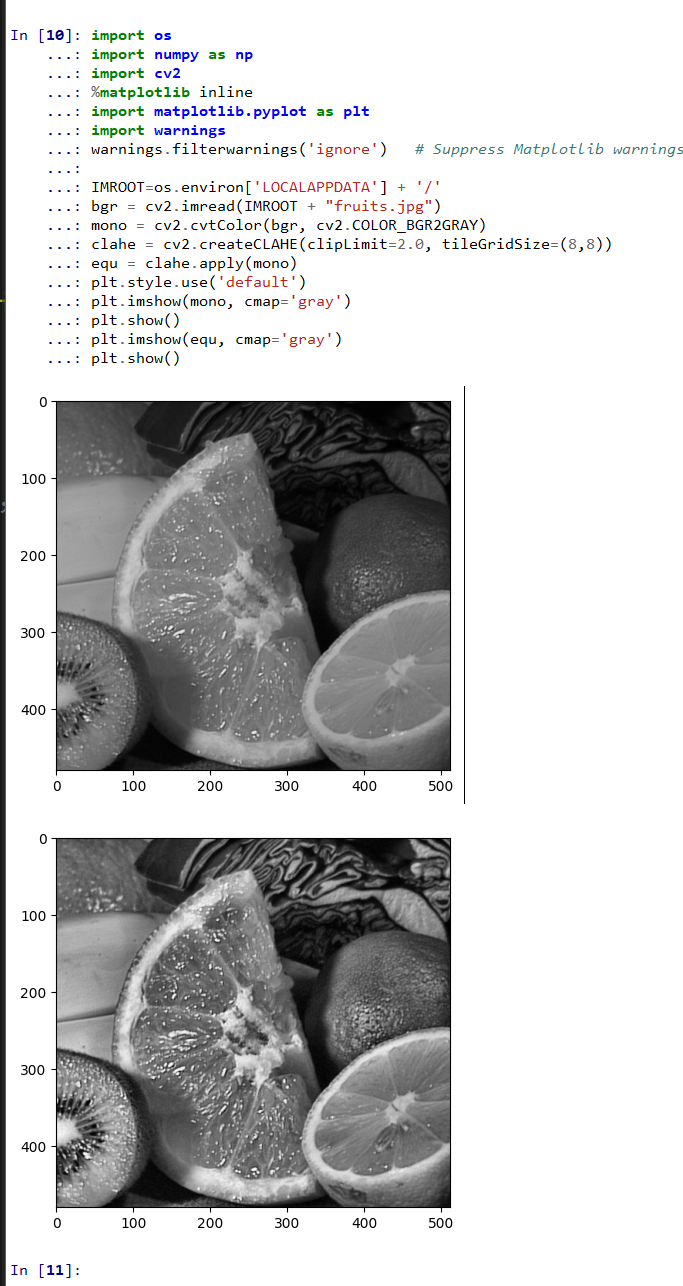
5.4.1 fruits.jpg での CLAHE(画像表示)
import os
import numpy as np
import cv2
%matplotlib inline
import matplotlib.pyplot as plt
IMROOT=os.environ['LOCALAPPDATA'] + '/'
bgr = cv2.imread(IMROOT + "fruits.jpg")
mono = cv2.cvtColor(bgr, cv2.COLOR_BGR2GRAY)
clahe = cv2.createCLAHE(clipLimit=2.0, tileGridSize=(8,8))
equ = clahe.apply(mono)
plt.style.use('default')
plt.imshow(mono, cmap='gray')
plt.axis('off')
plt.show()
plt.imshow(equ, cmap='gray')
plt.axis('off')
plt.show()
画像が表示されるので確認する.
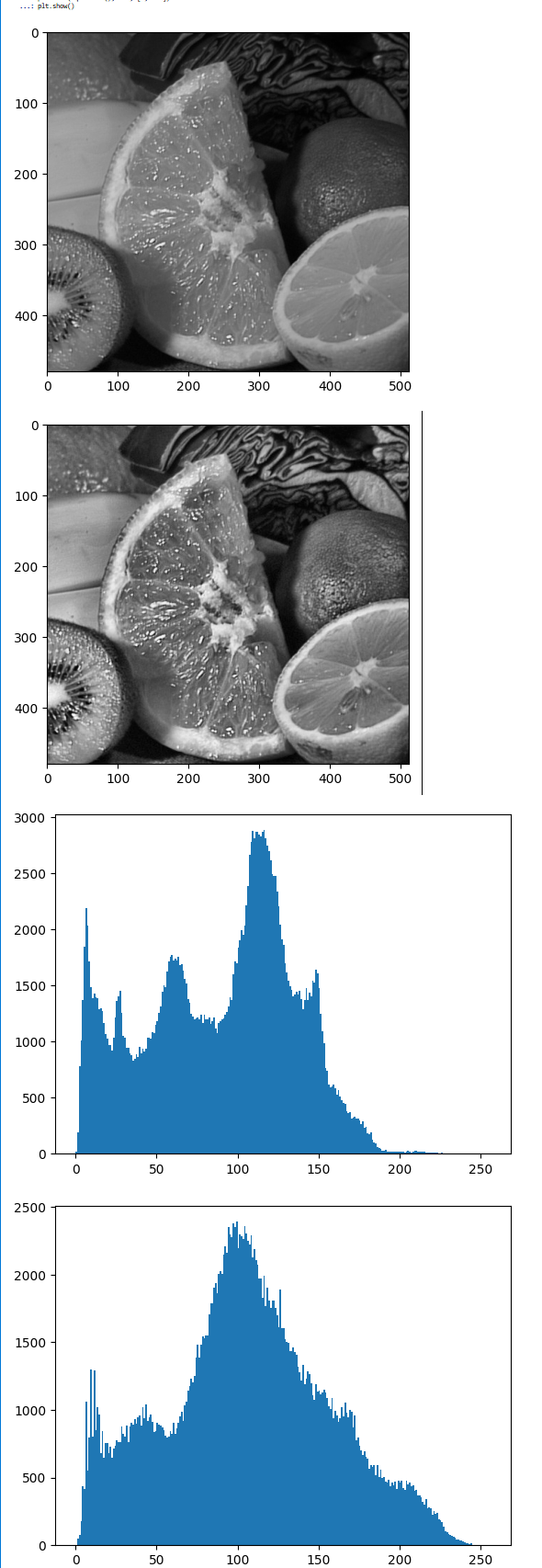
5.4.2 fruits.jpg での CLAHE(ヒストグラム表示)
import os
import numpy as np
import cv2
%matplotlib inline
import matplotlib.pyplot as plt
IMROOT=os.environ['LOCALAPPDATA'] + '/'
bgr = cv2.imread(IMROOT + "fruits.jpg")
mono = cv2.cvtColor(bgr, cv2.COLOR_BGR2GRAY)
clahe = cv2.createCLAHE(clipLimit=2.0, tileGridSize=(8,8))
equ = clahe.apply(mono)
plt.style.use('default')
plt.imshow(mono, cmap='gray')
plt.axis('off')
plt.show()
plt.imshow(equ, cmap='gray')
plt.axis('off')
plt.show()
plt.hist(mono.ravel(), 256, [0, 256])
plt.show()
plt.hist(equ.ravel(), 256, [0, 256])
plt.show()
ヒストグラムが表示されるので確認する.
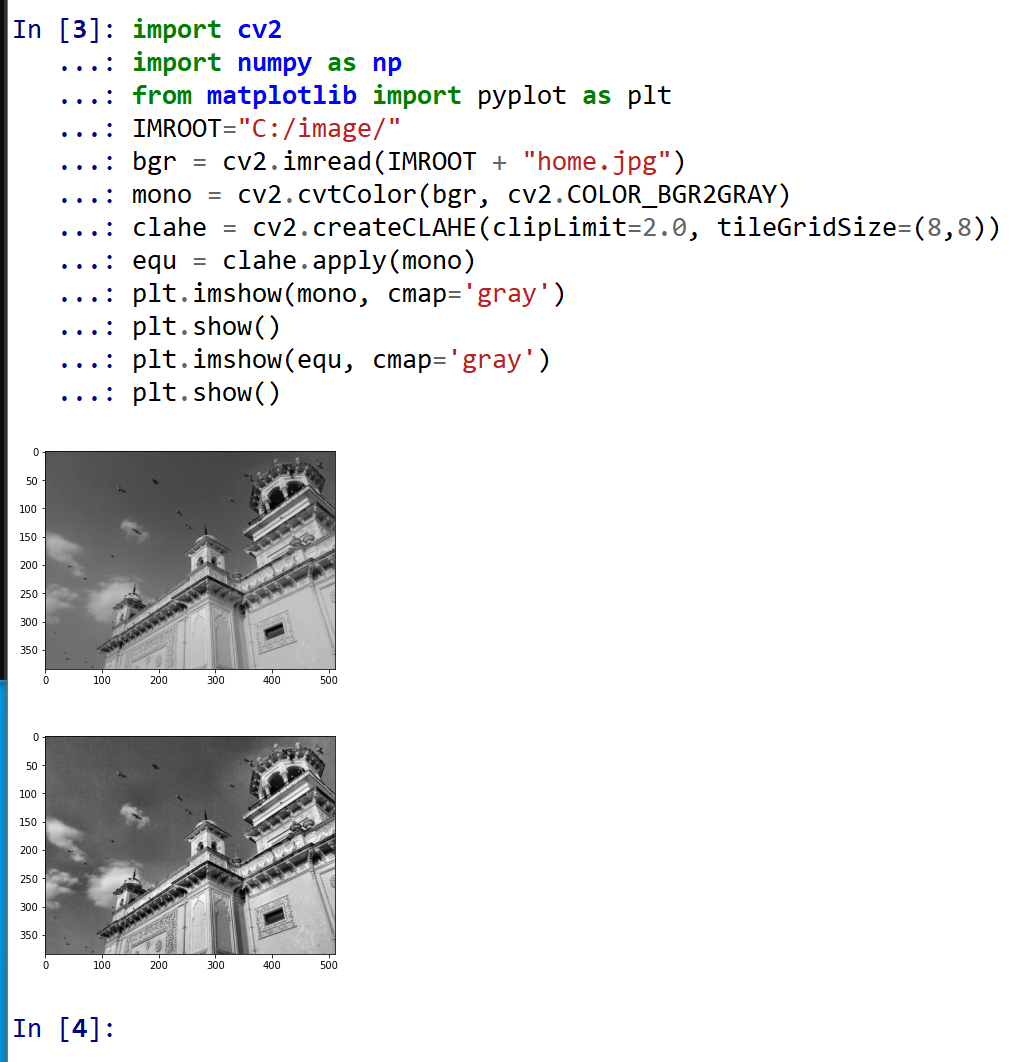
5.4.3 home.jpg での CLAHE(画像表示)
import os
import numpy as np
import cv2
%matplotlib inline
import matplotlib.pyplot as plt
IMROOT=os.environ['LOCALAPPDATA'] + '/'
bgr = cv2.imread(IMROOT + "home.jpg")
mono = cv2.cvtColor(bgr, cv2.COLOR_BGR2GRAY)
clahe = cv2.createCLAHE(clipLimit=2.0, tileGridSize=(8,8))
equ = clahe.apply(mono)
plt.style.use('default')
plt.imshow(mono, cmap='gray')
plt.axis('off')
plt.show()
plt.imshow(equ, cmap='gray')
plt.axis('off')
plt.show()
画像が表示されるので確認する.
5.4.4 home.jpg での CLAHE(ヒストグラム表示)
import os
import numpy as np
import cv2
%matplotlib inline
import matplotlib.pyplot as plt
IMROOT=os.environ['LOCALAPPDATA'] + '/'
bgr = cv2.imread(IMROOT + "home.jpg")
mono = cv2.cvtColor(bgr, cv2.COLOR_BGR2GRAY)
clahe = cv2.createCLAHE(clipLimit=2.0, tileGridSize=(8,8))
equ = clahe.apply(mono)
plt.style.use('default')
plt.imshow(mono, cmap='gray')
plt.axis('off')
plt.show()
plt.imshow(equ, cmap='gray')
plt.axis('off')
plt.show()
plt.hist(mono.ravel(), 256, [0, 256])
plt.show()
plt.hist(equ.ravel(), 256, [0, 256])
plt.show()
ヒストグラムが表示されるので確認する.
5.5 ノイズの付加
import os
import numpy as np
import cv2
%matplotlib inline
import matplotlib.pyplot as plt
IMROOT=os.environ['LOCALAPPDATA'] + '/'
bgr = cv2.imread(IMROOT + "fruits.jpg")
mono = cv2.cvtColor(bgr, cv2.COLOR_BGR2GRAY)
h, w = mono.shape
idx = np.random.randint(0, h * w, 30000)
mono.ravel()[idx] = np.random.randint(0, 255, 30000).astype(np.uint8)
plt.style.use('default')
plt.imshow(cv2.cvtColor(bgr, cv2.COLOR_BGR2RGB))
plt.axis('off')
plt.show()
plt.imshow(mono, cmap='gray')
plt.axis('off')
plt.show()
画像が表示されるので確認する.
5.6 ノイズ除去
ここでは,一度ノイズを加えてから処理を行っている.
import os
import numpy as np
import cv2
%matplotlib inline
import matplotlib.pyplot as plt
IMROOT=os.environ['LOCALAPPDATA'] + '/'
bgr = cv2.imread(IMROOT + "fruits.jpg")
mono = cv2.cvtColor(bgr, cv2.COLOR_BGR2GRAY)
h, w = mono.shape
idx = np.random.randint(0, h * w, 30000)
mono.ravel()[idx] = np.random.randint(0, 255, 30000).astype(np.uint8)
dst = cv2.fastNlMeansDenoising(mono, None, 30, 7, 21)
plt.style.use('default')
plt.imshow(cv2.cvtColor(bgr, cv2.COLOR_BGR2RGB))
plt.axis('off')
plt.show()
plt.imshow(mono, cmap='gray')
plt.axis('off')
plt.show()
plt.imshow(dst, cmap='gray')
plt.axis('off')
plt.show()
画像が表示されるので確認する.
5.7 OTSU の方法による2値化
5.7.1 fruits.jpg での2値化
import os
import numpy as np
import cv2
%matplotlib inline
import matplotlib.pyplot as plt
IMROOT=os.environ['LOCALAPPDATA'] + '/'
bgr = cv2.imread(IMROOT + "fruits.jpg")
mono = cv2.cvtColor(bgr, cv2.COLOR_BGR2GRAY)
r, dst = cv2.threshold(mono, 0, 255, cv2.THRESH_OTSU)
plt.style.use('default')
plt.imshow(cv2.cvtColor(bgr, cv2.COLOR_BGR2RGB))
plt.axis('off')
plt.show()
plt.imshow(mono, cmap='gray')
plt.axis('off')
plt.show()
plt.imshow(dst, cmap='gray')
plt.title('OTSU threshold: ' + str(r))
plt.axis('off')
plt.show()
画像が表示されるので確認する.
5.7.2 home.jpg での2値化
import os
import numpy as np
import cv2
%matplotlib inline
import matplotlib.pyplot as plt
IMROOT=os.environ['LOCALAPPDATA'] + '/'
bgr = cv2.imread(IMROOT + "home.jpg")
mono = cv2.cvtColor(bgr, cv2.COLOR_BGR2GRAY)
r, dst = cv2.threshold(mono, 0, 255, cv2.THRESH_OTSU)
plt.style.use('default')
plt.imshow(cv2.cvtColor(bgr, cv2.COLOR_BGR2RGB))
plt.axis('off')
plt.show()
plt.imshow(mono, cmap='gray')
plt.axis('off')
plt.show()
plt.imshow(dst, cmap='gray')
plt.title('OTSU threshold: ' + str(r))
plt.axis('off')
plt.show()
画像が表示されるので確認する.
5.8 輪郭抽出
5.8.1 fruits.jpg での輪郭抽出
import os
import numpy as np
import cv2
%matplotlib inline
import matplotlib.pyplot as plt
IMROOT=os.environ['LOCALAPPDATA'] + '/'
bgr = cv2.imread(IMROOT + "fruits.jpg")
mono = cv2.cvtColor(bgr, cv2.COLOR_BGR2GRAY)
r, dst = cv2.threshold(mono, 0, 255, cv2.THRESH_OTSU)
contours, hierarchy = cv2.findContours(dst, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
plt.style.use('default')
plt.imshow(cv2.cvtColor(bgr, cv2.COLOR_BGR2RGB))
plt.axis('off')
plt.show()
plt.imshow(mono, cmap='gray')
plt.axis('off')
plt.show()
plt.imshow(dst, cmap='gray')
plt.axis('off')
plt.show()
cv2.drawContours(bgr, contours, -1, (0, 255, 0), 3)
plt.imshow(cv2.cvtColor(bgr, cv2.COLOR_BGR2RGB))
plt.axis('off')
plt.show()
画像が表示されるので確認する.
5.8.2 home.jpg での輪郭抽出
import os
import numpy as np
import cv2
%matplotlib inline
import matplotlib.pyplot as plt
IMROOT=os.environ['LOCALAPPDATA'] + '/'
bgr = cv2.imread(IMROOT + "home.jpg")
mono = cv2.cvtColor(bgr, cv2.COLOR_BGR2GRAY)
r, dst = cv2.threshold(mono, 0, 255, cv2.THRESH_OTSU)
contours, hierarchy = cv2.findContours(dst, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
plt.style.use('default')
plt.imshow(cv2.cvtColor(bgr, cv2.COLOR_BGR2RGB))
plt.axis('off')
plt.show()
plt.imshow(mono, cmap='gray')
plt.axis('off')
plt.show()
plt.imshow(dst, cmap='gray')
plt.axis('off')
plt.show()
cv2.drawContours(bgr, contours, -1, (0, 255, 0), 3)
plt.imshow(cv2.cvtColor(bgr, cv2.COLOR_BGR2RGB))
plt.axis('off')
plt.show()
画像が表示されるので確認する.
【関連する外部ページ】 https://end0tknr.hateblo.jp/entry/20171105/1509845707
5.9 トラッキングポイント(Shi-Tomasi の手法)
5.9.1 fruits.jpg でのトラッキングポイント
import os
import numpy as np
import cv2
%matplotlib inline
import matplotlib.pyplot as plt
IMROOT=os.environ['LOCALAPPDATA'] + '/'
bgr = cv2.imread(IMROOT + "fruits.jpg")
mono = cv2.cvtColor(bgr, cv2.COLOR_BGR2GRAY)
d = cv2.goodFeaturesToTrack(mono, 80, 0.01, 5, blockSize=3)
d = np.intp(d)
for i in d:
x, y = i.ravel()
cv2.circle(mono, (x, y), 3, 255, -1)
plt.style.use('default')
plt.imshow(cv2.cvtColor(bgr, cv2.COLOR_BGR2RGB))
plt.axis('off')
plt.show()
plt.imshow(mono, cmap='gray')
plt.axis('off')
plt.show()
トラッキングポイントが表示される
5.9.2 home.jpg でのトラッキングポイント
import os
import numpy as np
import cv2
%matplotlib inline
import matplotlib.pyplot as plt
IMROOT=os.environ['LOCALAPPDATA'] + '/'
bgr = cv2.imread(IMROOT + "home.jpg")
mono = cv2.cvtColor(bgr, cv2.COLOR_BGR2GRAY)
d = cv2.goodFeaturesToTrack(mono, 80, 0.01, 5, blockSize=3)
d = np.intp(d)
for i in d:
x, y = i.ravel()
cv2.circle(mono, (x, y), 3, 255, -1)
plt.style.use('default')
plt.imshow(cv2.cvtColor(bgr, cv2.COLOR_BGR2RGB))
plt.axis('off')
plt.show()
plt.imshow(mono, cmap='gray')
plt.axis('off')
plt.show()
トラッキングポイントが表示される
6. まとめ
濃淡画像への変換とイメージヒストグラム
cv2.cvtColor に cv2.COLOR_BGR2GRAY を指定し,カラー画像を濃淡画像に変換する.イメージヒストグラムは画素の明るさによるヒストグラムで,横軸が明るさ,縦軸が画素数を表す.
ヒストグラム平坦化(equalizeHist と CLAHE)
ヒストグラム平坦化は,モノクロ画像のコントラストを改善する手法で,画素の輝度を調整してヒストグラムを平坦化する.CLAHE は輪郭線が残りやすい平坦化手法で,clipLimit と tileGridSize を指定して使用する.
ノイズの付加と除去
乱数で画素値を書き換えてノイズを付加する.濃淡画像のノイズ除去には cv2.fastNlMeansDenoising,カラー画像には cv2.fastNlMeansDenoisingColored を使う.
OTSU の方法による2値化
2値化は全画素を2値に変換する処理である.cv2.threshold に cv2.THRESH_OTSU を指定し,閾値を自動決定する.
輪郭抽出とトラッキングポイント
輪郭抽出は,2値化結果から cv2.findContours で輪郭を抽出し,cv2.drawContours で描画する.トラッキングポイントは cv2.goodFeaturesToTrack で Shi-Tomasi の手法によりコーナーを検出し,cv2.circle で描画する.