Windows で OpenNI2 と KINECT ドライバと NITE のダウンロードとインストール
この Web ページの目次
- OpenNI2 のダウンロードとインストール
OpenNI に登録できるモジュールには、3D センサー, RGB カメラ, IR カメラ, オーディオ・デバイスがあります. また、ミドルウエアの要素 (middleware component) としては、全身解析、手の点 (hand point) に関する解析、ジェスチャ解析、シーン解析(背景分離、床面の座標系、シーン内のフィギュアの識別)
- KINECT 用のドライバ Sensor のダウンロード
- NITE のダウンロードとインストール
- KINECT 用のドライバ Sensor のビルドとインストール
- アンインストール
- テスト実行


【関連する外部ページ】http://nma.web.nitech.ac.jp/fukushima/openni/openni.html
前準備
- Microsoft Visual C++ 2010 Express Edition ダウンロードとインストール
別の Web ページで、 Microsoft Visual C++ 2010 Express Edition のインストールについて説明している.
- cmake のインストール
http://www.cmake.org/cmake/resources/software.html からダウンロードし、インストール
- OpenCV のダウンロードとインストール
別の Web ページで、 OpenCV 2.4.5 のインストールについて説明している.
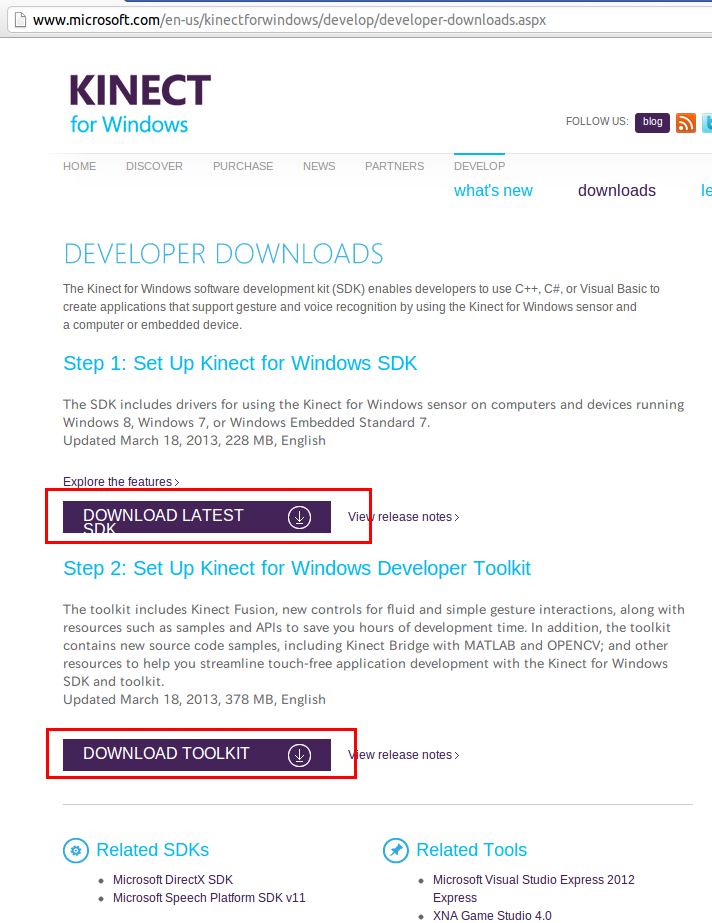
◆ KINECT for Windows SDK, KINECT for Windows Toolkit のダウンロードとインストール
KINECT for Windows SDK とは、 KINECT を用いたジェスチャ認識、音声認識の機能を持つ C++, C#, Visual Basic プログラムを作成するためのソフトウェア。 KINECT for Windows toolkit とは、 KINECT を用いたジェスチャ制御や、便利なAPI,サンプルプログラム、Matlab や OpenCV のサンプログログラムなどから構成される.
- KINECT for Windows の Web ページを開く http://www.microsoft.com/en-us/kinectforwindows/develop/developer-downloads.aspx を開く
- 「DOWNLOAD LATEST SDK」と
「DOWNLOAD TOOLKIT」をクリック
◆ OpenNI 2 (OpenNI Windows 2.1.0) のダウンロードとインストール
http://www.openni.org/openni-sdk/ デバイスをPCに接続後、 「全てのプログラム」→「OpenNI」→「Samples」の、 NiSimpleRead NiViewer
◆ NITE 2 (NITE Windows 2.2) のダウンロードとインストール
http://www.openni.org/files/nite/
◆
- OpenNI のダウンロード
cd /tmp git clone https://github.com/OpenNI/OpenNI2.git
- README を確認
- LPGL.txt を確認
- OpenNI の再配布パッケージのビルド
cd OpenNI2 cd Redist if [ `arch` = 'x86_64' ]; then ./ReleaseVersion.py x64 else ./ReleaseVersion.py x86 fi
- ビルドの結果の確認

- インストール
cd /usr/local sudo tar -xvjof /tmp/OpenNI2/Redist/Final/OpenNI-Linux-x86-2.0.0.tar.bz2 cd /usr/local/OpenNI-2.0.0 sudo bash ./install.sh
- インストールの結果の確認
エラーメッセージが出ていないことを確認する

- /etc/bash.bashrc の設定
cat /usr/local/OpenNI-2.0.0/OpenNIDevEnvironment | sudo tee -a /etc/bash.bashrc
◆ NITE のダウンロードとインストール
- OpenNI の Web ページを開く
- Downloads をクリックし,「OpenNI Modules」を選ぶ

- ダウンロードしたいコンポーネントとして「PrimeSense NITE」を選択
ファイルの選択では、 32-bit か 64-bit を気をつける

- ダウンロードしたファイルの解凍
◆ 操作手順例
cd /tmp mkdir NITE-v1.5.2.21 cd NITE-v1.5.2.21 sudo tar -xvjof /tmp/nite-bin-linux-x64-v1.5.2.21.tar.bz2
- ライセンスの設定
- ファイルのモード
cd /tmp cd NITE-v1.5.2.21 find . -name "*.xml" | sudo xargs chmod 644
- /tmp/NITE-v1.5.2.21/NITE-Bin-Dev-Linux-x64-v1.5.2.21/Data/Sample-User.xml を編集する
「<License ...」の行を探す.

ライセンスキーを設定する。次のようになる.

- /tmp/NITE-v1.5.2.21/NITE-Bin-Dev-Linux-x64-v1.5.2.21/Data/Sample-Scene.xml を編集する

- /tmp/NITE-v1.5.2.21/NITE-Bin-Dev-Linux-x64-v1.5.2.21/Data/Sample-Tracking.xml を編集する

- ファイルのモード
- (オプション) 解像度とフレームレートの設定
/tmp/NITE-v1.5.2.21/NITE-Bin-Dev-Linux-x64-v1.5.2.21/Data/Sample-User.xml, /tmp/NITE-v1.5.2.21/NITE-Bin-Dev-Linux-x64-v1.5.2.21/Data/Sample-Scene.xml, /tmp/NITE-v1.5.2.21/NITE-Bin-Dev-Linux-x64-v1.5.2.21/Data/Sample-Tracking.xml を編集する
< MapOutputMode xRes="640" yRes="480" FPS="30"/> - sudo mkdir /var/lib/ni の実行
sudo mkdir /var/lib/ni - niLicense コマンドの実行
cd /tmp/NITE-v1.5.2.21/NITE-Bin-Dev-Linux-x64-v1.5.2.21 sudo niLicense PrimeSense 0KOIk2JeIBYClPWVnMoRKn5cdY4=
- install.bash の実行
cd /tmp/NITE-v1.5.2.21/NITE-Bin-Dev-Linux-x64-v1.5.2.21 sudo bash ./install.sh
◆ KINECT 用のドライバ Sensor のダウンロード
* PrimeSense のものをダウンロードする場合
- KINECT 用のドライバ Sensor のダウンロード
cd /tmp git clone https://github.com/PrimeSense/Sensor
* ros のものをダウンロードする場合
Kinect 用のドライバ Sensor のダウンロード
cd /tmp
git clone https://github.com/ros-pkg-git/Sensor
* avin2 のものをダウンロードする場合
- Kinect 用のドライバ Sensor のダウンロード
cd /tmp git clone https://github.com/avin2/SensorKinect cd SensorKinect
◆ Kinect 用のドライバ Sensor のビルドとインストール
* PrimeSense のものを使う場合
- 再配布可能パッケージのビルド
cd /tmp cd Sensor cd Platform/Linux/CreateRedist ./RedistMaker
- ビルドの結果の確認

- インストール
cd /tmp cd Sensor cd Platform/Linux/Redist cd Sensor-Bin-Linux* sudo ./install.sh
- インストールの結果の確認

- 設定ファイル等の確認
ls /var/log/primesense ls /usr/etc/primesense
* avin2 のものを使う場合
- ビルド
cd /tmp/SensorKinect/Platform/Linux-x86/Build sudo make - ビルドの結果の確認
- インストール
cd /tmp/SensorKinect/Platform/Linux-x86/Build sudo make install - インストールの結果の確認
◆ OpenNI の動作確認
Kinect をつなぎ、次のプログラムを実行する。
#include<iostream>
#include<stdexcept>
#include<XnCppWrapper.h>
int main()
{
xn::Context context;
XnStatus rc = context.Init();
if ( rc != XN_STATUS_OK ) {
printf("error");
}
else {
printf("success");
}
}
次のように操作してコンパイルする
g++ -o a.out -I/usr/include/ni hoge.cc -lOpenNI
success と表示されれば成功

テスト実行
OpenNI
cd /tmp/OpenNI
cd Platform/Linux-x86/Bin/Release
./Sample-NiSimpleViewer
NITE
cd /tmp/NITE-v1.5.2.21
cd Samples/Bin/Release
./Sample-Players
(オプション) アンインストール
新しい版に入れ替えたい場合、他のドライバを試したい場合
- Kinect ドライバ Sensor のアンインストール
cd /tmp/Sensor/Platform/Linux-x86/Build sudo make uninstall - NITE のアンインストール
cd /tmp/NITE-v1.5.2.21 sudo bash ./uninstall.sh - OpenNI をアンインストールをしたい場合
cd /tmp/OpenNI/Platform/Linux-x86/Build sudo make install