単純な CNN を用いた画像分類(PyTorch のサンプルプログラムを使用)
ユースケース: PyTorch の動作確認を行いたい.CNN (PyTorch を使用)について練習したい
次のWebページに記載のソースコード(単純な CNN を用いた画像分類)を実行してみる
先人に感謝
PyTorch の Web ページ: http://pytorch.org
GitHub の PyTorch の Webページ: https://github.com/pytorch/pytorch
前準備
PyTorch 2.3 (NVIDIA CUDA ツールキット11.8 用)のインストール(Windows 上)
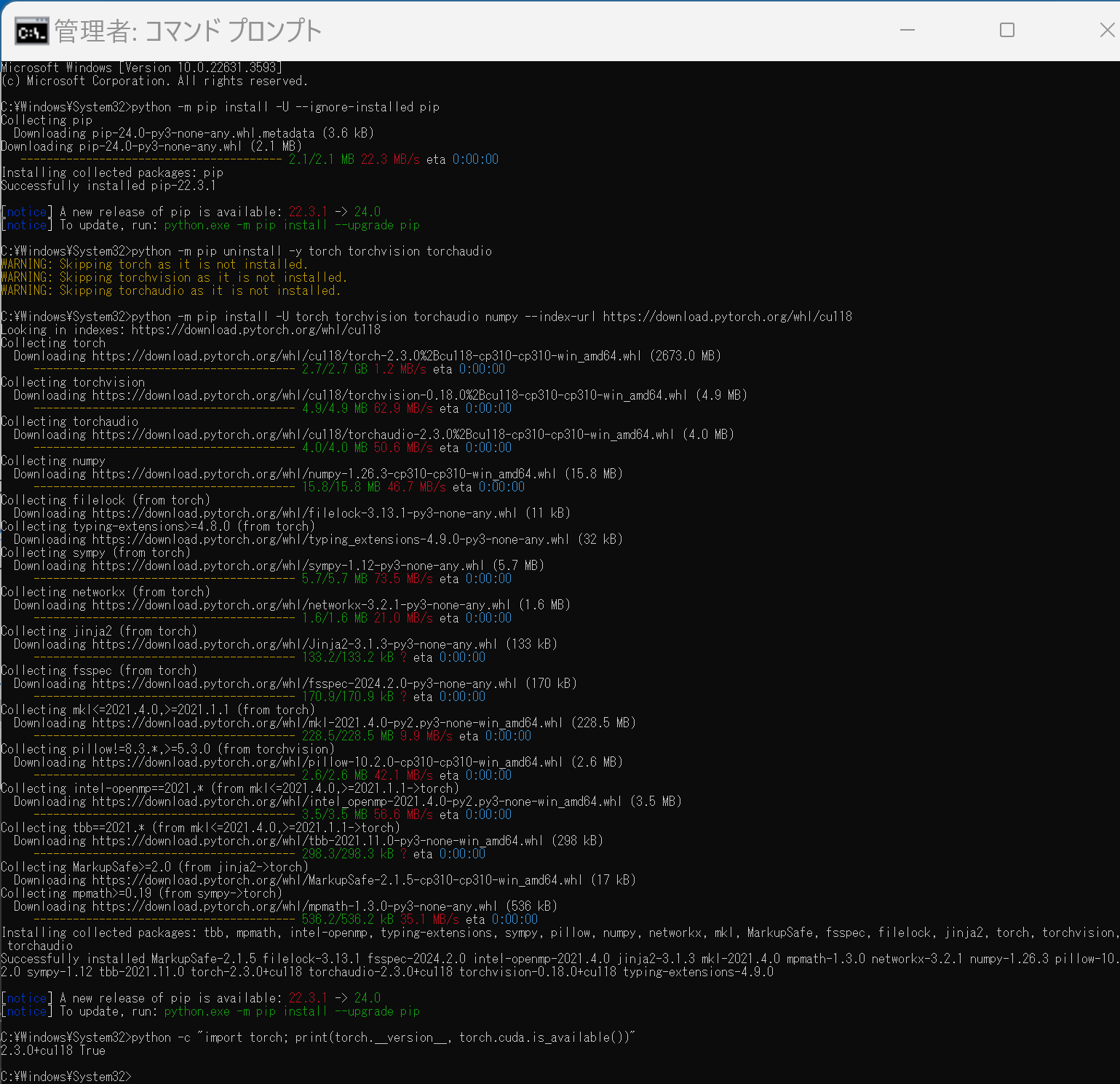
次のコマンドを実行することにより, PyTorch 2.3 (NVIDIA CUDA ツールキット 11.8 用)がインストールされる.
- Windows で,管理者権限でコマンドプロンプトを起動(手順:Windowsキーまたはスタートメニュー >
cmdと入力 > 右クリック > 「管理者として実行」)。 - PyTorch の公式ページを確認
- 次のようなコマンドを実行(実行するコマンドは,PyTorch のページの表示されるコマンドを使う).
次のコマンドを実行することにより, PyTorch 2.3 (NVIDIA CUDA 11.8 用)がインストールされる. 但し,Anaconda3を使いたい場合には別手順になる.
事前に NVIDIA CUDA のバージョンを確認しておくこと(ここでは,NVIDIA CUDA ツールキット 11.8 が前もってインストール済みであるとする).
PyTorch で,GPU が動作している場合には,「torch.cuda.is_available()」により,True が表示される.
python -m pip install -U --ignore-installed pip python -m pip uninstall -y torch torchvision torchaudio torchtext xformers python -m pip install -U torch torchvision torchaudio numpy --index-url https://download.pytorch.org/whl/cu118 python -c "import torch; print(torch.__version__, torch.cuda.is_available())"
【関連する外部ページ】
【サイト内の関連ページ】
- GPU対応PyTorch 2.3のセットアップと性能確認(Windows 上): 別ページ »で説明
- PyTorch の最新版を検証,開発者に貢献したいなどの場合には,ソースコードからビルドして,インストールする: 別ページ »で説明
【関連項目】 NVIDIA CUDA ツールキット, PyTorch
単純な CNN を用いた画像分類(PyTorch のサンプルプログラムを使用)
Python プログラムの実行
- Windows では python (Python ランチャーは py)
- Ubuntu では python3
Python 開発環境(Jupyter Qt Console, Jupyter ノートブック (Jupyter Notebook), Jupyter Lab, Nteract, Spyder, PyCharm, PyScripterなど)も便利である.
Python のまとめ: 別ページ »にまとめ
python
- インポート
import torch import torchvision import torchvision.transforms as transforms
Ubuntu での実行結果例

- CIFAR 10 のダウンロード
transform = transforms.Compose( [transforms.ToTensor(), transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))]) trainset = torchvision.datasets.CIFAR10(root='./data', train=True, download=True, transform=transform) trainloader = torch.utils.data.DataLoader(trainset, batch_size=4, shuffle=True, num_workers=2) testset = torchvision.datasets.CIFAR10(root='./data', train=False, download=True, transform=transform) testloader = torch.utils.data.DataLoader(testset, batch_size=4, shuffle=False, num_workers=2) classes = ('plane', 'car', 'bird', 'cat', 'deer', 'dog', 'frog', 'horse', 'ship', 'truck')Ubuntu での実行結果例

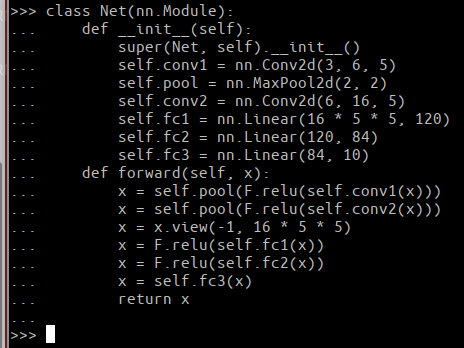
- CNN の定義
import torch.nn as nn import torch.nn.functional as F class Net(nn.Module): def __init__(self): super(Net, self).__init__() self.conv1 = nn.Conv2d(3, 6, 5) self.pool = nn.MaxPool2d(2, 2) self.conv2 = nn.Conv2d(6, 16, 5) self.fc1 = nn.Linear(16 * 5 * 5, 120) self.fc2 = nn.Linear(120, 84) self.fc3 = nn.Linear(84, 10) def forward(self, x): x = self.pool(F.relu(self.conv1(x))) x = self.pool(F.relu(self.conv2(x))) x = x.view(-1, 16 * 5 * 5) x = F.relu(self.fc1(x)) x = F.relu(self.fc2(x)) x = self.fc3(x) return xUbuntu での実行結果例
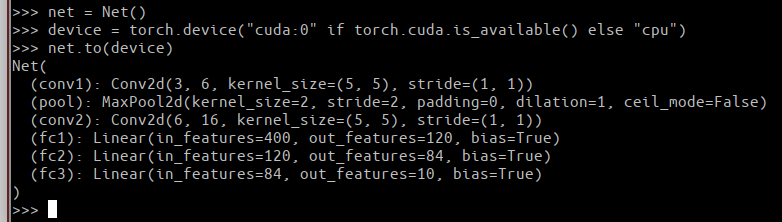
- GPU デバイスがあれば,それを使いたい
net = Net() device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu") net.to(device)Ubuntu での実行結果例
- 損失関数と最適化の定義
import torch.optim as optim criterion = nn.CrossEntropyLoss() optimizer = optim.SGD(net.parameters(), lr=0.001, momentum=0.9)
Ubuntu での実行結果例

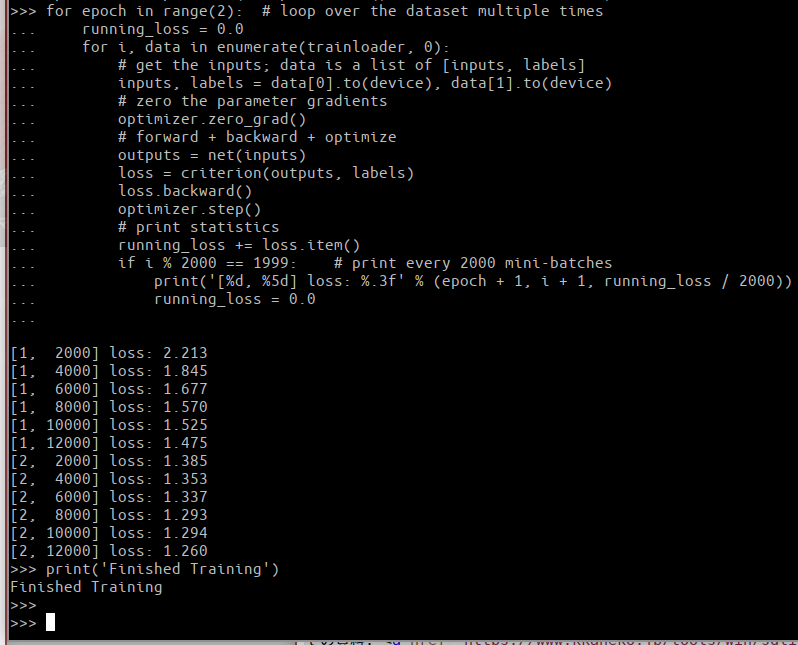
- 学習
「inputs, labels = data[0].to(device), data[1].to(device)」は,GPUでもプログラムが動くようにするための処理
for epoch in range(2): # loop over the dataset multiple times running_loss = 0.0 for i, data in enumerate(trainloader, 0): # get the inputs; data is a list of [inputs, labels] inputs, labels = data[0].to(device), data[1].to(device) # zero the parameter gradients optimizer.zero_grad() # forward + backward + optimize outputs = net(inputs) loss = criterion(outputs, labels) loss.backward() optimizer.step() # print statistics running_loss += loss.item() if i % 2000 == 1999: # print every 2000 mini-batches print('[%d, %5d] loss: %.3f' % (epoch + 1, i + 1, running_loss / 2000)) running_loss = 0.0 print('Finished Training')Ubuntu での実行結果例
- テストデータを用いたテスト
dataiter = iter(testloader) d = dataiter.next() images, labels = d[0].to(device), d[1].to(device) # print images imshow(torchvision.utils.make_grid(images)) outputs = net(images) _, predicted = torch.max(outputs, 1) print('Predicted: ', ' '.join('%5s' % classes[predicted[j]] for j in range(4))) print('GroundTruth: ', ' '.join('%5s' % classes[labels[j]] for j in range(4)))Ubuntu での実行結果例