RT-DETRv2による物体検出・ByteTrackによる追跡とByteTrackの可視化,TTAの機能付き(COCO 80クラス)(ソースコードと説明と利用ガイド)
プログラム利用ガイド
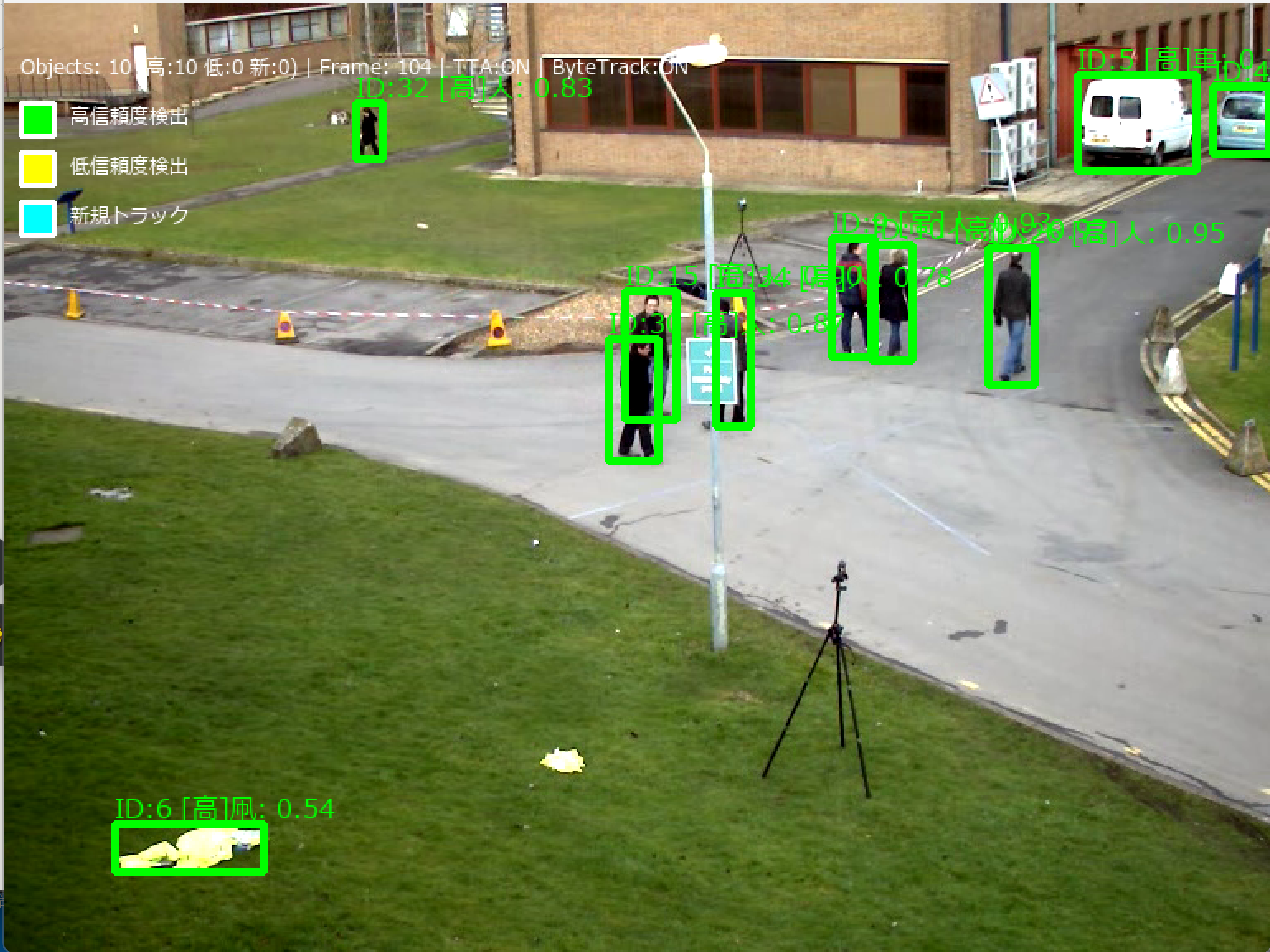
色分けによる検出の可視化
- 緑色の太枠(4px) - 高信頼度検出(CONF_THRESH = 0.25以上)
- 黄色の太枠(4px) - 低信頼度検出(0.1以上0.25未満で追跡に使用)
- シアン色の太枠(4px) - 新規トラック(新しく出現した物体)
画面表示の改善
- 左上に色分けの凡例を表示
- 各検出ボックスに「[高]」「[低]」「[新]」のラベルを追加
- 統計情報に「高:X 低:Y 新:Z」の形式で内訳を表示
設定値
- BYTETRACK_VIZ = True - 可視化機能の有効化
- LOW_CONF_THRESH = 0.1 - 低信頼度検出の最小閾値
可視化により、ByteTrackがどのように動作しているかが明確に分かります:
- 第1段階:緑色の高信頼度検出と既存トラックの関連付け
- 第2段階:黄色の低信頼度検出による遮蔽物体の回復
- 新規検出:シアン色で新しく登場した物体を強調
プログラムを実行すると、これらの色分けがリアルタイムで確認できます。
事前準備
ここでは、最低限の事前準備について説明する。機械学習や深層学習を行う場合は、NVIDIA CUDA、Visual Studio、Cursorなどを追加でインストールすると便利である。これらについては別ページ https://www.kkaneko.jp/cc/dev/aiassist.htmlで詳しく解説しているので、必要に応じて参照してください。Python 3.12 のインストール
Pythonのインストールを行い、Pythonのプログラムを実行する環境を整える。扱う環境は、Windows搭載パソコンである。金子研究室では、Python 3.12.10を推奨する。
[Windows での Python 3.12 のインストール手順を見るには、ここをクリック]
Windows での Python 3.12 のインストール
以下のいずれかの方法でPython 3.12をインストールする。Pythonがインストール済みの場合、この手順は不要である。
方法 1:winget によるインストール
【インストールコマンドの実行方法】
管理者権限でコマンドプロンプトを起動する(手順:Windowsキーまたはスタートメニュー → cmd と入力 → 右クリック → 「管理者として実行」)。そして、コマンド全体をコマンドプロンプトにコピー&ペーストする。
--scope machine を指定することで、システム全体(全ユーザー向け)にインストールされる。このオプションの実行には管理者権限が必要である。インストール完了後、コマンドプロンプトを再起動するとPATHが反映される。
REM Python 3.12 をシステム領域にインストール
winget install --id Python.Python.3.12 -e --scope machine --silent --accept-source-agreements --accept-package-agreements --override "/quiet InstallAllUsers=1 PrependPath=1 Include_test=0 Include_pip=1 Include_launcher=1 InstallLauncherAllUsers=1 TargetDir=\"C:\Program Files\Python312\""
REM Python と Scripts を PATH 先頭に追加
powershell -NoProfile -Command "$p='C:\Program Files\Python312'; $s=\"$p\Scripts\"; $c=[Environment]::GetEnvironmentVariable('Path','Machine'); if((Test-Path $p) -and (';'+$c+';' -notlike \"*;$p;*\") -and (';'+$c+';' -notlike \"*;$s;*\")){[Environment]::SetEnvironmentVariable('Path',\"$p;$s;$c\",'Machine')}"
方法 2:インストーラーによるインストール
- Python公式サイト(https://www.python.org/downloads/)にアクセスし、「Download Python 3.x.x」ボタンからWindows用インストーラーをダウンロードする。
- ダウンロードしたインストーラーを実行する。
- 初期画面の下部に表示される「Add python.exe to PATH」にチェックを入れてから「Customize installation」を選択する。このチェックを入れ忘れると、コマンドプロンプトから
pythonコマンドを実行できない。 - 「Install Python 3.xx for all users」にチェックを入れ、「Install」をクリックする。
インストールの確認
コマンドプロンプトで以下を実行する。
python --versionバージョン番号(例:Python 3.12.x)が表示されればインストール成功である。「'python' は、内部コマンドまたは外部コマンドとして認識されていません。」と表示される場合は、インストールが正常に完了していない。
Python の開発環境 Visual Studio Code のインストールと Python 用の設定
Python の開発環境Visual Studio Code(プログラムを編集するソフトウェア。以下、VS Code)を整える。
[Windows での Visual Studio Code のインストールと Python 用の設定手順を見るには、ここをクリック]
Windows での Visual Studio Code のインストールと Python 用の設定手順
1. VS Code と拡張機能のインストール
以下のコマンドにより,既存の VS Code を削除し,全ユーザー共有の設定で再インストールしたうえで,拡張機能(VS Code に機能を追加するソフトウェア)をまとめて導入する.
【インストールコマンドの実行方法】
管理者権限でコマンドプロンプトを起動する(手順:Windows キーまたはスタートメニュー → cmd と入力 → 右クリック → 「管理者として実行」)。そして,コマンド全体をコマンドプロンプトにコピー&ペーストする。
インストールコマンド
REM ============================================================
REM Microsoft Visual Studio Code
REM ============================================================
winget uninstall -e --id Microsoft.VisualStudioCode --silent --disable-interactivity --accept-source-agreements
rmdir /s /q C:\ProgramData\vscode-extensions 2>nul
rmdir /s /q "%APPDATA%\Code" 2>nul
rmdir /s /q "%USERPROFILE%\.vscode" 2>nul
rmdir /s /q "%LOCALAPPDATA%\Microsoft\vscode-update" 2>nul
REM VS Code をシステム領域に新規インストール
winget install --scope machine --id Microsoft.VisualStudioCode -e --silent --accept-source-agreements --accept-package-agreements
REM 全ユーザー共有の拡張機能フォルダ
mkdir C:\ProgramData\vscode-extensions 2>nul
icacls "C:\ProgramData\vscode-extensions" /grant "Everyone:(OI)(CI)M" /T
REM スタートメニューのショートカットを --extensions-dir 付きで再作成
rmdir /s /q "C:\ProgramData\Microsoft\Windows\Start Menu\Programs\Visual Studio Code" 2>nul
del "C:\ProgramData\Microsoft\Windows\Start Menu\Programs\Visual Studio Code.lnk" 2>nul
powershell -NoProfile -Command "$s=New-Object -ComObject WScript.Shell; $lnk=$s.CreateShortcut('C:\ProgramData\Microsoft\Windows\Start Menu\Programs\Visual Studio Code.lnk'); $lnk.TargetPath='C:\Program Files\Microsoft VS Code\Code.exe'; $lnk.Arguments='--extensions-dir \"C:\ProgramData\vscode-extensions\"'; $lnk.Save()"
REM ショートカットの検証
powershell -NoProfile -Command "$s=New-Object -ComObject WScript.Shell; $lnk=$s.CreateShortcut('C:\ProgramData\Microsoft\Windows\Start Menu\Programs\Visual Studio Code.lnk'); Write-Host 'TargetPath:' $lnk.TargetPath; Write-Host 'Arguments:' $lnk.Arguments"
REM ファイル / フォルダ右クリックの「Code で開く」を登録
reg add "HKLM\SOFTWARE\Classes\*\shell\VSCode\command" /ve /d "\"C:\Program Files\Microsoft VS Code\Code.exe\" --extensions-dir \"C:\ProgramData\vscode-extensions\" \"%1\"" /f
reg add "HKLM\SOFTWARE\Classes\Directory\shell\VSCode\command" /ve /d "\"C:\Program Files\Microsoft VS Code\Code.exe\" --extensions-dir \"C:\ProgramData\vscode-extensions\" \"%1\"" /f
reg add "HKLM\SOFTWARE\Classes\Directory\Background\shell\VSCode\command" /ve /d "\"C:\Program Files\Microsoft VS Code\Code.exe\" --extensions-dir \"C:\ProgramData\vscode-extensions\" \"%V\"" /f
REM --extensions-dir 付きで起動する code.cmd ラッパを作成
REM (%* を echo で書くと対話的 cmd で失われるため、PowerShell で [char]37+'*' を書き出す)
powershell -NoProfile -Command "$pct=[char]37; $q=[char]34; $c='@echo off'+[char]13+[char]10+$q+'C:\Program Files\Microsoft VS Code\bin\code.cmd'+$q+' --extensions-dir '+$q+'C:\ProgramData\vscode-extensions'+$q+' '+$pct+'*'+[char]13+[char]10; [IO.File]::WriteAllText('C:\ProgramData\vscode-extensions\vscode.cmd',$c,[Text.Encoding]::ASCII)"
REM 拡張機能のインストール
set "CODE=C:\Program Files\Microsoft VS Code\bin\code.cmd"
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --uninstall-extension GitHub.copilot
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --uninstall-extension GitHub.copilot-chat
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --install-extension ms-python.python
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --install-extension ms-python.vscode-pylance
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --install-extension ms-python.debugpy
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --install-extension MS-CEINTL.vscode-language-pack-ja
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --install-extension saoudrizwan.claude-dev
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --install-extension rust-lang.rust-analyzer
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --install-extension tamasfe.even-better-toml
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --install-extension anthropic.claude-code
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --install-extension almenon.arepl
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --list-extensions --show-versions
echo === セットアップ完了 ===
2. Python インタプリタの選択
同一マシンに複数の Python がインストールされている場合,VS Code で使用する Python 本体(インタプリタ:Python プログラムを解釈・実行するソフトウェア)を選択する必要がある.
- コマンドパレット(コマンド名で機能を呼び出す VS Code の入力欄)を開く(
Ctrl+Shift+P) Python: Select Interpreterと入力する
- 表示される一覧から,使用する Python(例:
C:\Program Files\Python312\python.exe)を選択する.
必要なパッケージのインストール
管理者権限でコマンドプロンプトを起動し、以下のコマンドを実行する:
REM PyTorch をインストール(GPU対応版)
set "CUDA_TAG=cu128"
set "PYTHON_PATH=C:\Program Files\Python312"
"%PYTHON_PATH%\Scripts\pip" install --no-user -U numpy torch torchvision torchaudio --index-url https://download.pytorch.org/whl/%CUDA_TAG%
pip install -U transformers opencv-python numpy pillow boxmot
RT-DETRv2による物体検出プログラム・ByteTrackによる追跡とTTAの機能付き(COCO 80クラス)
概要
このプログラムは、RT-DETRv2を用いた物体検出システムである。動画ファイル、ウェブカメラ、サンプル動画から取得した映像に対してリアルタイムで物体検出を実行し、COCOデータセット80クラスの物体をバウンディングボックスで表示する。検出精度の向上を目的として、CLAHE(コントラスト制限付き適応ヒストグラム均一化)とTTA(Test-Time Augmentation)を組み合わせた前処理を実装している[1][2]。
主要技術
RT-DETRv2(Real-Time Detection Transformer version 2)
Peking UniversityとBaiduが開発したリアルタイム物体検出Transformerの改良版である[1][2]。RT-DETRの後継として、選択的マルチスケール特徴抽出、離散サンプリング演算子、動的データ拡張によりBag-of-Freebiesアプローチを実装し、速度を損なうことなく精度を向上させる。NMS(非最大抑制)を必要としないエンドツーエンドのアーキテクチャを採用する。
CLAHE(Contrast Limited Adaptive Histogram Equalization)
Zuiderveldが1994年に提案したコントラスト強化手法である[3][4]。画像を小領域(タイル)に分割し、各タイルでヒストグラム均一化を適用する。コントラスト制限機能により、ノイズの過度な増幅を防止する。
ByteTrack
カルマンフィルタとハンガリアンアルゴリズムを組み合わせた物体追跡手法である。低信頼度検出も含めた2段階の関連付けにより、遮蔽環境でも安定した追跡を実現する。
技術的特徴
- Test-Time Augmentation(TTA)による検出精度向上
推論時に元画像と水平反転画像の両方を処理し、Non-Maximum Suppression(NMS)で結果を統合する[5][6]。この手法により物体の向きに対する頑健性が向上し、検出漏れが減少する。
- CLAHE前処理による暗部環境対応
YUV色空間のY(輝度)チャンネルにCLAHEを適用し、暗い場所や逆光環境での検出精度を向上させる[3][4]。clipLimit=3.0、tileGridSize=(8,8)のパラメータを使用する。
- GPU/CPU自動検出システム
CUDA対応GPUの有無を自動判定し、利用可能な場合はGPU処理、そうでない場合はCPU処理に自動切り替えを行う。
- 固定信頼度閾値フィルタリング
物体検出の信頼度閾値(CONF_THRESHOLD=0.25)とTTA用のNMS閾値(NMS_THRESHOLD=0.6)による安定したフィルタリングを実装する。
- ByteTrack物体追跡
フレーム間での物体の継続的な追跡により、一時的な検出失敗や遮蔽に対する頑健性を提供する。各物体に固有のIDを割り当て、軌跡を管理する。
実装の特色
リアルタイム映像処理に特化した設計を採用し、以下の機能を備える:
- 3つの入力ソース選択(動画ファイル、ウェブカメラ、サンプル動画)
- 日本語対応のリアルタイム結果表示(Pillow + Meiryoフォント使用)
- 3種類のバックボーン選択(ResNet-50D、ResNet-101D、HGNetv2-L)
- ByteTrack追跡による物体ID管理機能
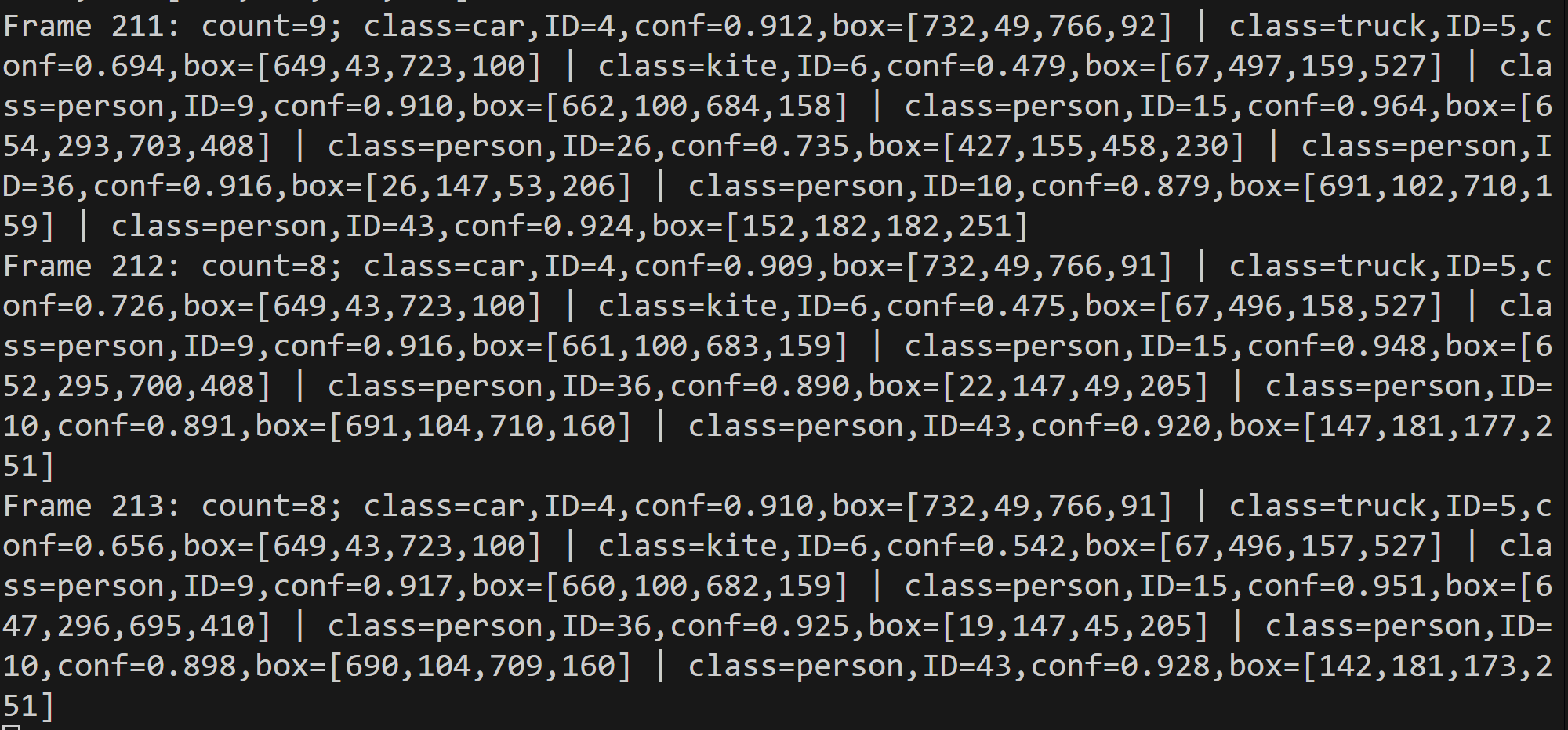
- 検出結果の自動ファイル出力機能(result.txt)
- フレーム処理結果の詳細ログ出力
- 色分けされたクラス別バウンディングボックス表示
参考文献
[1] Lv, W., Zhao, Y., Chang, Q., Huang, K., Wang, G., & Liu, Y. (2024). RT-DETRv2: Improved Baseline with Bag-of-Freebies for Real-Time Detection Transformer. arXiv preprint arXiv:2407.17140.
[2] Hugging Face. (2024). RT-DETRv2 Documentation. https://huggingface.co/docs/transformers/en/model_doc/rt_detr_v2
[3] Zuiderveld, K. (1994). Contrast limited adaptive histogram equalization. Graphics gems IV, 474-485.
[4] OpenCV Team. (2024). Histogram Equalization Documentation. https://docs.opencv.org/4.x/d5/daf/tutorial_py_histogram_equalization.html
[5] Shanmugam, D., Blalock, D., Balakrishnan, G., & Guttag, J. (2021). When and why test-time augmentation works. arXiv preprint arXiv:2011.11156.
[6] Machine Learning Mastery. (2020). How to Use Test-Time Augmentation. https://machinelearningmastery.com/how-to-use-test-time-augmentation-to-improve-model-performance-for-image-classification/
ソースコード