OpenAI Gym のプログラムを試してみる
Web ページhttps://github.com/openai/gym/blob/master/examples/agents/random_agent.py のプログラムを実行してみる.
前準備
OpenAI Gym のインストール
OpenAI Gym のインストールは,別ページ »で説明
OpenAI Gym を使ってみる
ランダム動作のプログラム
まずは、ランダムな動作.前準備がうまくいったかの確認も兼ねる.
Python プログラムを動かしたい.
import gym
env = gym.make('CartPole-v1') # make your environment!
for i_episode in range(20):
observation = env.reset()
for t in range(100):
env.render() # render game screen
action = env.action_space.sample() # this is random action. replace here to your algorithm!
observation, reward, done, info = env.step(action) # get reward and next scene
if done:
print("Episode finished after {} timesteps".format(t+1))
break
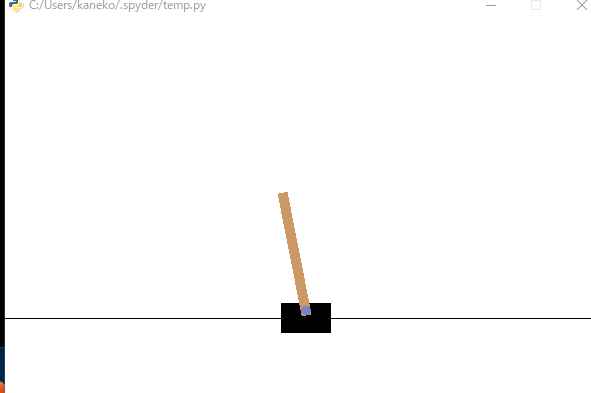
次のような画面が出る.
Environment の確認
Python プログラムを動かしたい.
import gym
env = gym.make('CartPole-v1') # make your environment!
for i_episode in range(20):
observation = env.reset()
for t in range(100):
env.render() # render game screen
print(observation)
action = env.action_space.sample() # this is random action. replace here to your algorithm!
observation, reward, done, info = env.step(action) # get reward and next scene
if done:
print("Episode finished after {} timesteps".format(t+1))
break
結果を確認する.
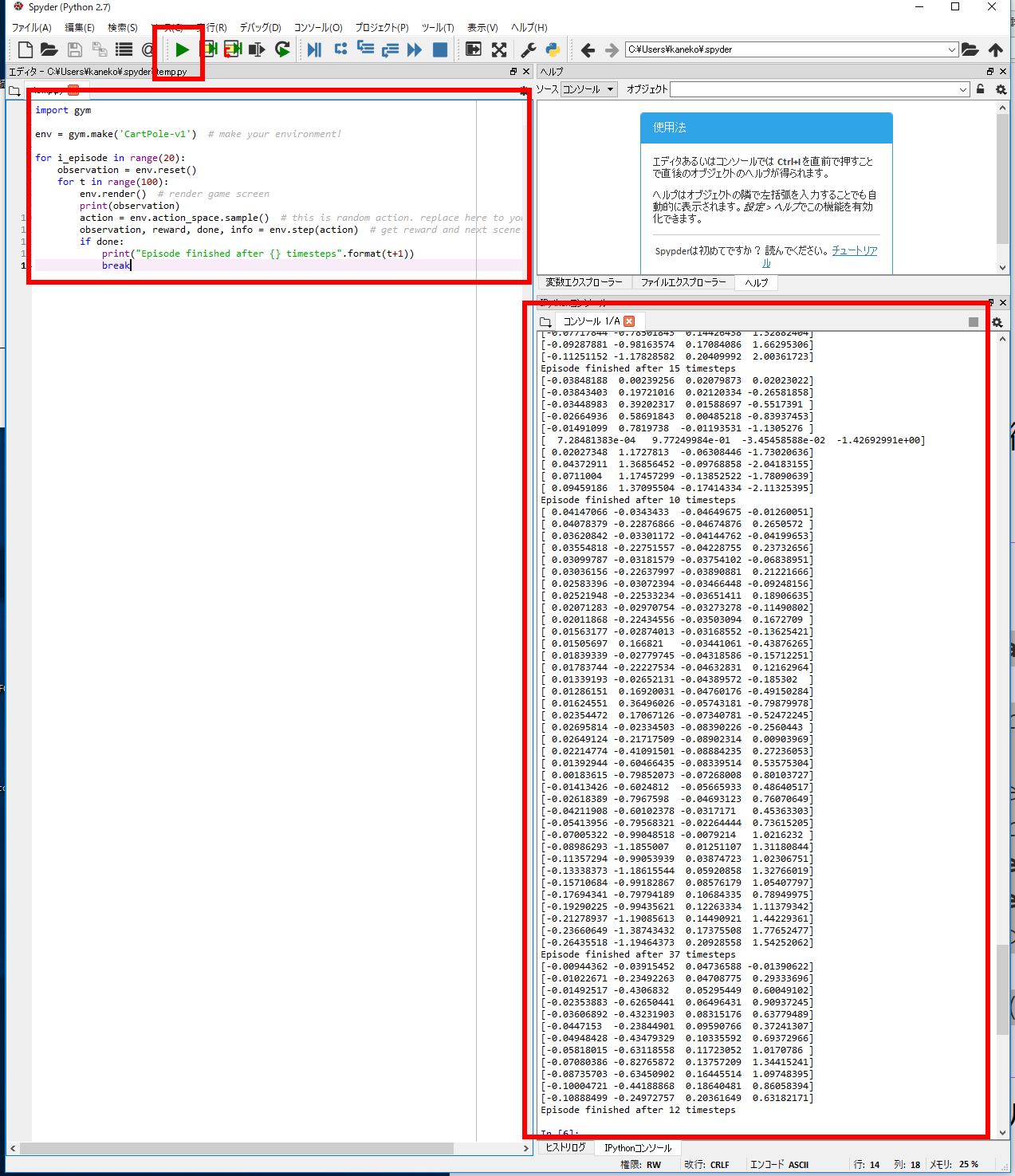
ここに出ているのは、各繰り返し (timestep) での Environment の値 (変数名は observation). 繰り返しが進むと、Environment の値が変化していることがわかる。
空間 (space)
Python プログラムを動かしたい.
import gym
env = gym.make('CartPole-v1')
print(env.action_space)
#> Discrete(2)
print(env.observation_space)
#> Box(4,)
結果を確認する.

- env.action_space: Agent がとりえるアクション.「2」と表示されるのは「アクションは,2個の正または0の数です」という言う意味
このプログラムでは
- 1つめ: 左への力
- 2つめ: 右への力
- env.observation_space: 環境から観測される値.「4」と表示されるのは「環境から観測される値,4個の数です」という言う意味
ログを残すプログラム
【関連する外部ページ】https://github.com/openai/gym/blob/master/examples/agents/random_agent.py のプログラムを使用している.
- FFmpeg のインストール
- Python プログラムの実行
Python プログラムの実行
- Windows では python (Python ランチャーは py)
- Ubuntu では python3
Python 開発環境(Jupyter Qt Console, Jupyter ノートブック (Jupyter Notebook), Jupyter Lab, Nteract, Spyder, PyCharm, PyScripterなど)も便利である.
Python のまとめ: 別ページ »にまとめ
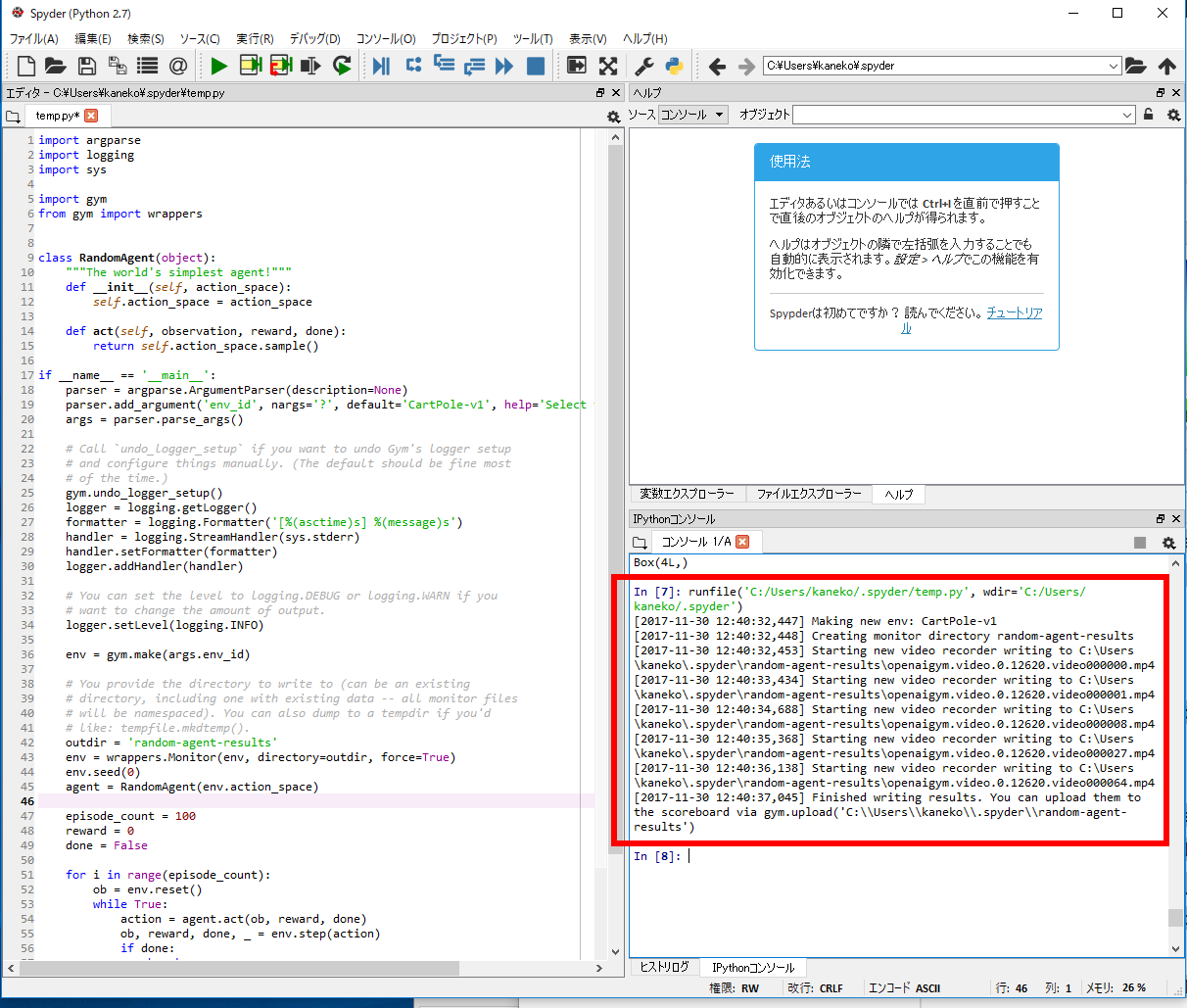
pythonimport argparse import logging import sys import gym from gym import wrappers class RandomAgent(object): """The world's simplest agent!""" def __init__(self, action_space): self.action_space = action_space def act(self, observation, reward, done): return self.action_space.sample() if __name__ == '__main__': parser = argparse.ArgumentParser(description=None) parser.add_argument('env_id', nargs='?', default='CartPole-v1', help='Select the environment to run') args = parser.parse_args() # Call `undo_logger_setup` if you want to undo Gym's logger setup # and configure things manually. (The default should be fine most # of the time.) gym.undo_logger_setup() logger = logging.getLogger() formatter = logging.Formatter('[%(asctime)s] %(message)s') handler = logging.StreamHandler(sys.stderr) handler.setFormatter(formatter) logger.addHandler(handler) # You can set the level to logging.DEBUG or logging.WARN if you # want to change the amount of output. logger.setLevel(logging.INFO) env = gym.make(args.env_id) # You provide the directory to write to (can be an existing # directory, including one with existing data -- all monitor files # will be namespaced). You can also dump to a tempdir if you'd # like: tempfile.mkdtemp(). outdir = 'random-agent-results' env = wrappers.Monitor(env, directory=outdir, force=True) env.seed(0) agent = RandomAgent(env.action_space) episode_count = 100 reward = 0 done = False for i in range(episode_count): ob = env.reset() while True: action = agent.act(ob, reward, done) ob, reward, done, _ = env.step(action) if done: break # Note there's no env.render() here. But the environment still can open window and # render if asked by env.monitor: it calls env.render('rgb_array') to record video. # Video is not recorded every episode, see capped_cubic_video_schedule for details. # Close the env and write monitor result info to disk env.close()結果を確認する.
これは、ログを記録しましたよというメッセージ.ログファイルのディレクトリ名を確認
いま確認したログファイルのディレクトリを開いてみる
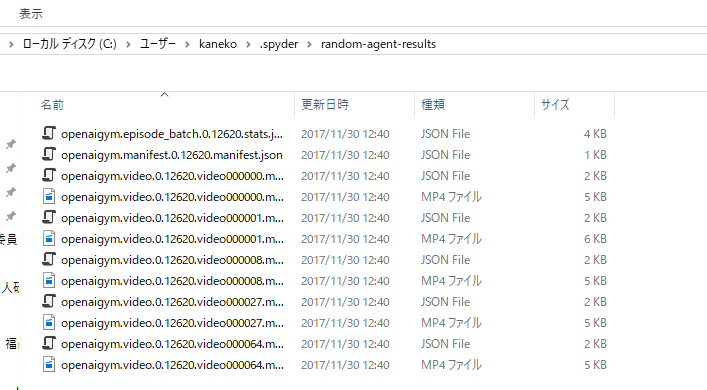
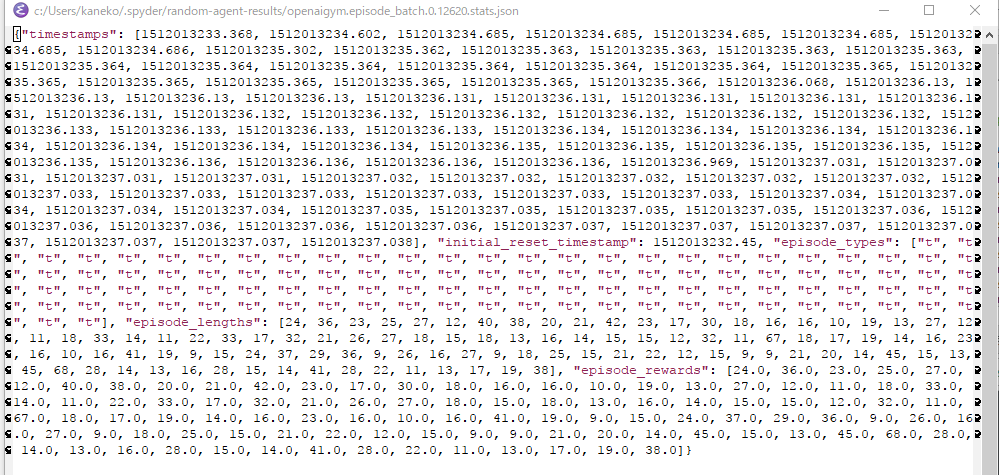
拡張子 .stats.json のファイルを開いてみる
episode_types, episode_length, episode_rewards などの値が確認できる.
OpenAI に付属の強化学習のサンプルプログラム cem.py を動かしてみる
- 次のサイトから zip 形式ファイルをダウンロードし展開(解凍)
- cem.py を確認
- Python プログラムの実行
Python プログラムの実行
- Windows では python (Python ランチャーは py)
- Ubuntu では python3
Python 開発環境(Jupyter Qt Console, Jupyter ノートブック (Jupyter Notebook), Jupyter Lab, Nteract, Spyder, PyCharm, PyScripterなど)も便利である.
Python のまとめ: 別ページ »にまとめ
pythonpython cem.py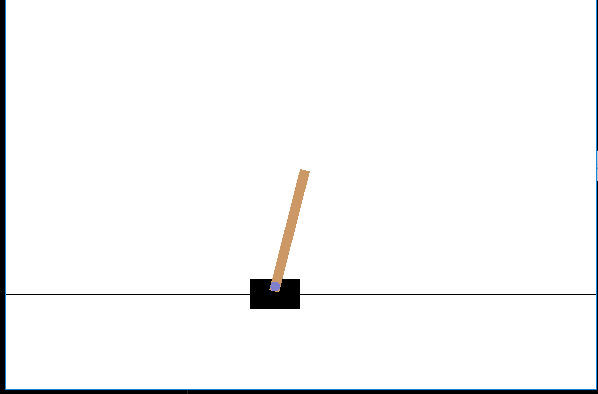
これは強化学習のプログラムになっている