ArtyZiff35/3D_Reconstruction_From_Stereo_Images のインストールとステレオ画像からの3次元モデルの生成(ステレオ画像,深度マップ,色付き3次元点群)(Python を使用)(Windows 上)
【関連する外部ページ】
GitHub のページ: https://github.com/ArtyZiff35/3D_Reconstruction_From_Stereo_Images
1. 前準備
Python 3.12 のインストール(Windows 上) [クリックして展開]
以下のいずれかの方法で Python 3.12 をインストールする。Python がインストール済みの場合、この手順は不要である。
方法1:winget によるインストール
管理者権限のコマンドプロンプトで以下を実行する。管理者権限のコマンドプロンプトを起動するには、Windows キーまたはスタートメニューから「cmd」と入力し、表示された「コマンドプロンプト」を右クリックして「管理者として実行」を選択する。
winget install --id Python.Python.3.12 -e --scope machine --silent --accept-source-agreements --accept-package-agreements --override "/quiet InstallAllUsers=1 PrependPath=1 Include_test=0 Include_pip=1 Include_launcher=1 InstallLauncherAllUsers=1 TargetDir=\"C:\Program Files\Python312\""
powershell -Command "$p='C:\Program Files\Python312'; $s=\"$p\Scripts\"; $m=[Environment]::GetEnvironmentVariable('Path','Machine'); if($m -notlike \"*$s*\") { [Environment]::SetEnvironmentVariable('Path', \"$p;$s;$m\", 'Machine') }"--scope machine を指定することで、システム全体(全ユーザー向け)にインストールされる。このオプションの実行には管理者権限が必要である。インストール完了後、コマンドプロンプトを再起動すると PATH が自動的に設定される。
方法2:インストーラーによるインストール
- Python 公式サイト(https://www.python.org/downloads/)にアクセスし、「Download Python 3.x.x」ボタンから Windows 用インストーラーをダウンロードする。
- ダウンロードしたインストーラーを実行する。
- 初期画面の下部に表示される「Add python.exe to PATH」に必ずチェックを入れてから「Customize installation」を選択する。このチェックを入れ忘れると、コマンドプロンプトから
pythonコマンドを実行できない。 - 「Install Python 3.xx for all users」にチェックを入れ、「Install」をクリックする。
インストールの確認
コマンドプロンプトで以下を実行する。
python --versionバージョン番号(例:Python 3.12.x)が表示されればインストール成功である。「'python' は、内部コマンドまたは外部コマンドとして認識されていません。」と表示される場合は、インストールが正常に完了していない。
Git のインストール
管理者権限のコマンドプロンプトで以下を実行する。管理者権限のコマンドプロンプトを起動するには、Windows キーまたはスタートメニューから「cmd」と入力し、表示された「コマンドプロンプト」を右クリックして「管理者として実行」を選択する。
REM Git をシステム領域にインストール
winget install --scope machine --id Git.Git -e --silent --disable-interactivity --force --accept-source-agreements --accept-package-agreements --override "/VERYSILENT /NORESTART /NOCANCEL /SP- /CLOSEAPPLICATIONS /RESTARTAPPLICATIONS /COMPONENTS=""icons,ext\reg\shellhere,assoc,assoc_sh"" /o:PathOption=Cmd /o:CRLFOption=CRLFCommitAsIs /o:BashTerminalOption=MinTTY /o:DefaultBranchOption=main /o:EditorOption=VIM /o:SSHOption=OpenSSH /o:UseCredentialManager=Enabled /o:PerformanceTweaksFSCache=Enabled /o:EnableSymlinks=Disabled /o:EnableFSMonitor=Disabled"
【関連する外部ページ】
- Git の公式ページ: https://git-scm.com/
2. ArtyZiff35/3D_Reconstruction_From_Stereo_Images のインストール
- 以下の手順を管理者権限のコマンドプロンプトで実行する
(手順:Windowsキーまたはスタートメニュー →
cmdと入力 → 右クリック → 「管理者として実行」)。 - pip の更新と,ArtyZiff35/3D_Reconstruction_From_Stereo_Images のインストール
* 「 python -m pip install ...」は,Pythonのライブラリをインストールするためのコマンド.
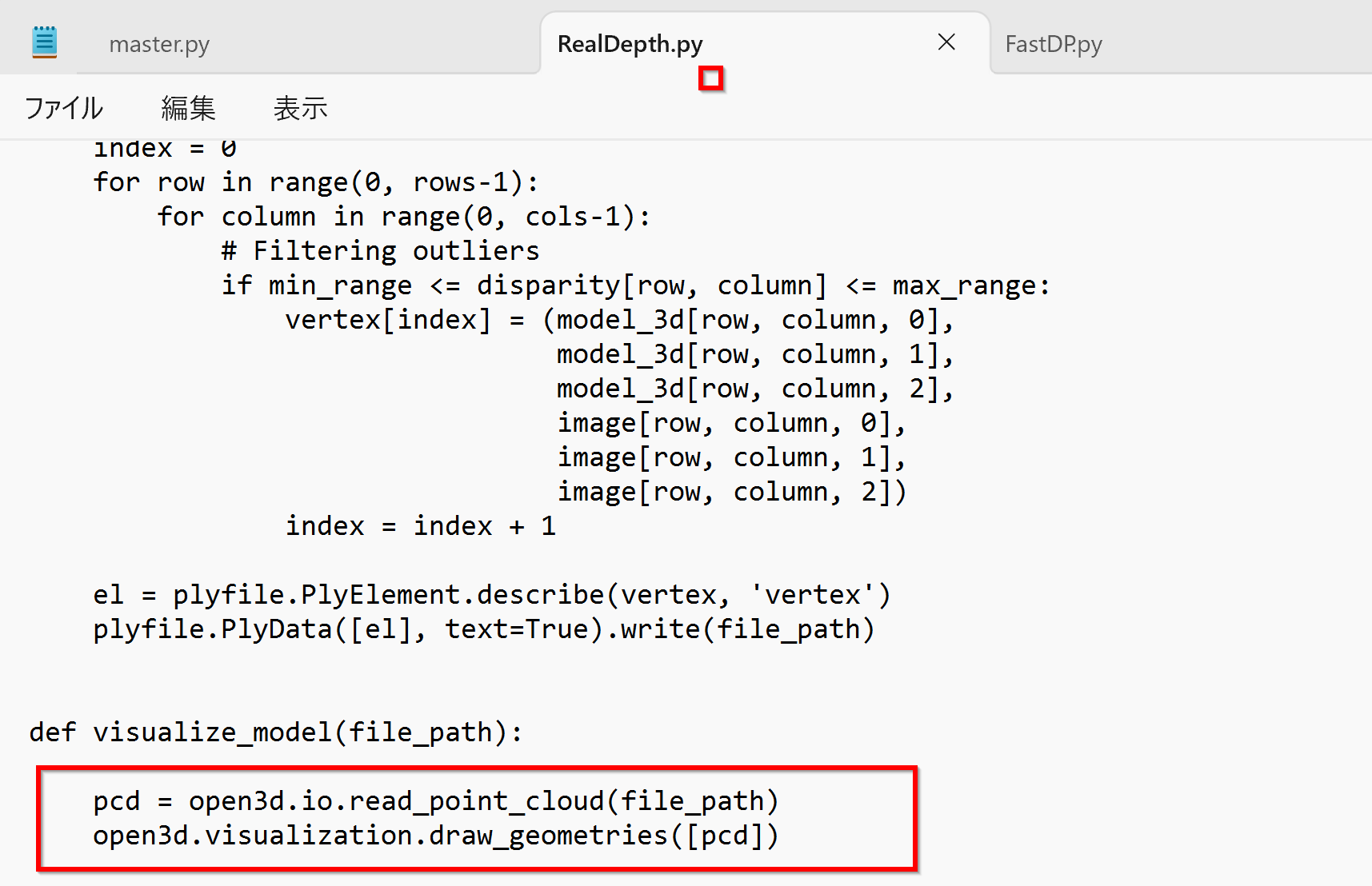
python -m pip install -U --ignore-installed pip pip install -U matplotlib seaborn plyfile open3d cd /d c:%HOMEPATH% rmdir /s /q 3D_Reconstruction_From_Stereo_Images git clone --recursive https://github.com/ArtyZiff35/3D_Reconstruction_From_Stereo_Images cd 3D_Reconstruction_From_Stereo_Images - ソースコード src\RealDepth.py の書き換え(2か所)
cd /d c:%HOMEPATH% cd 3D_Reconstruction_From_Stereo_Images notepad src\RealDepth.py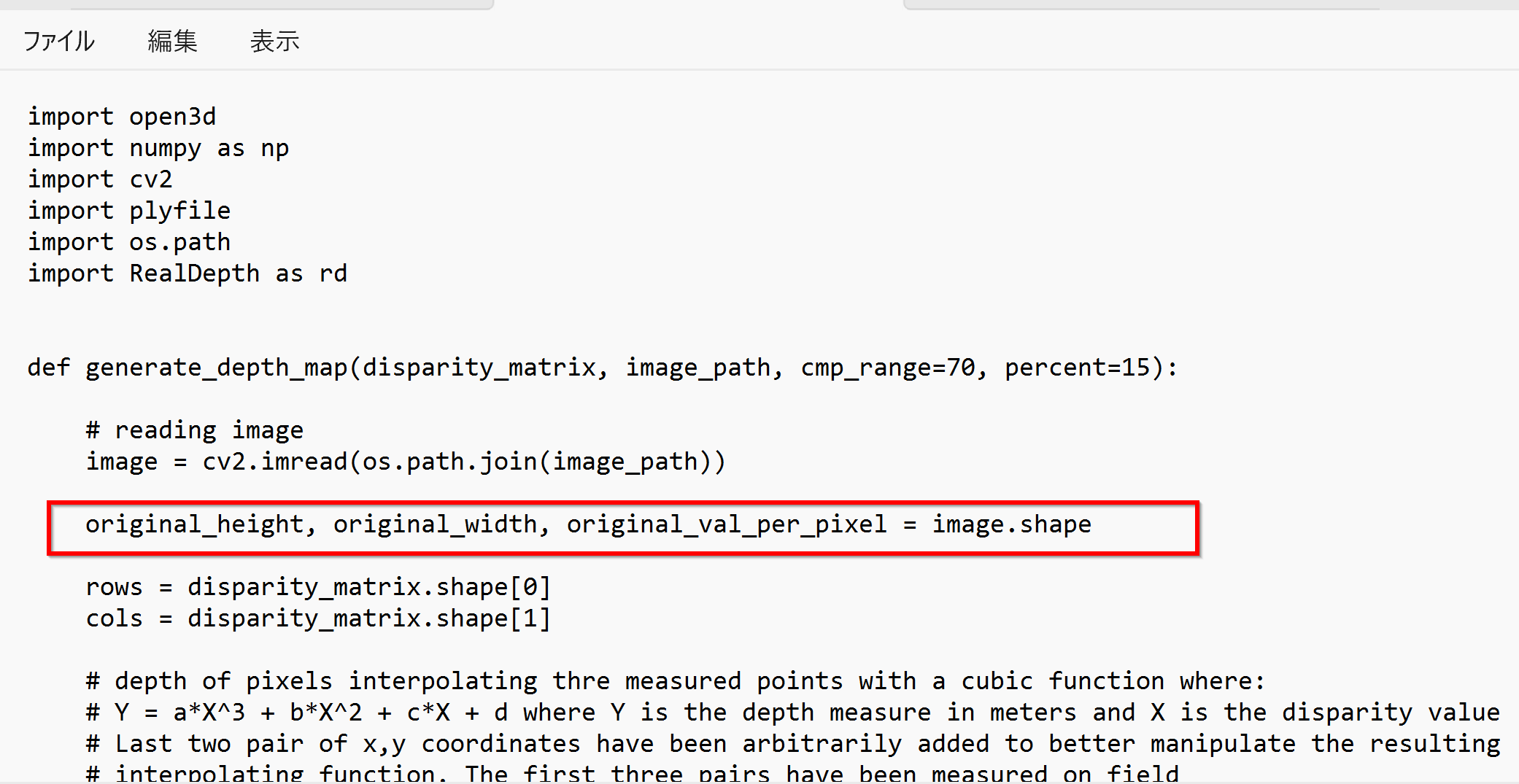
- ソースコード src\master.py の書き換え(1か所)
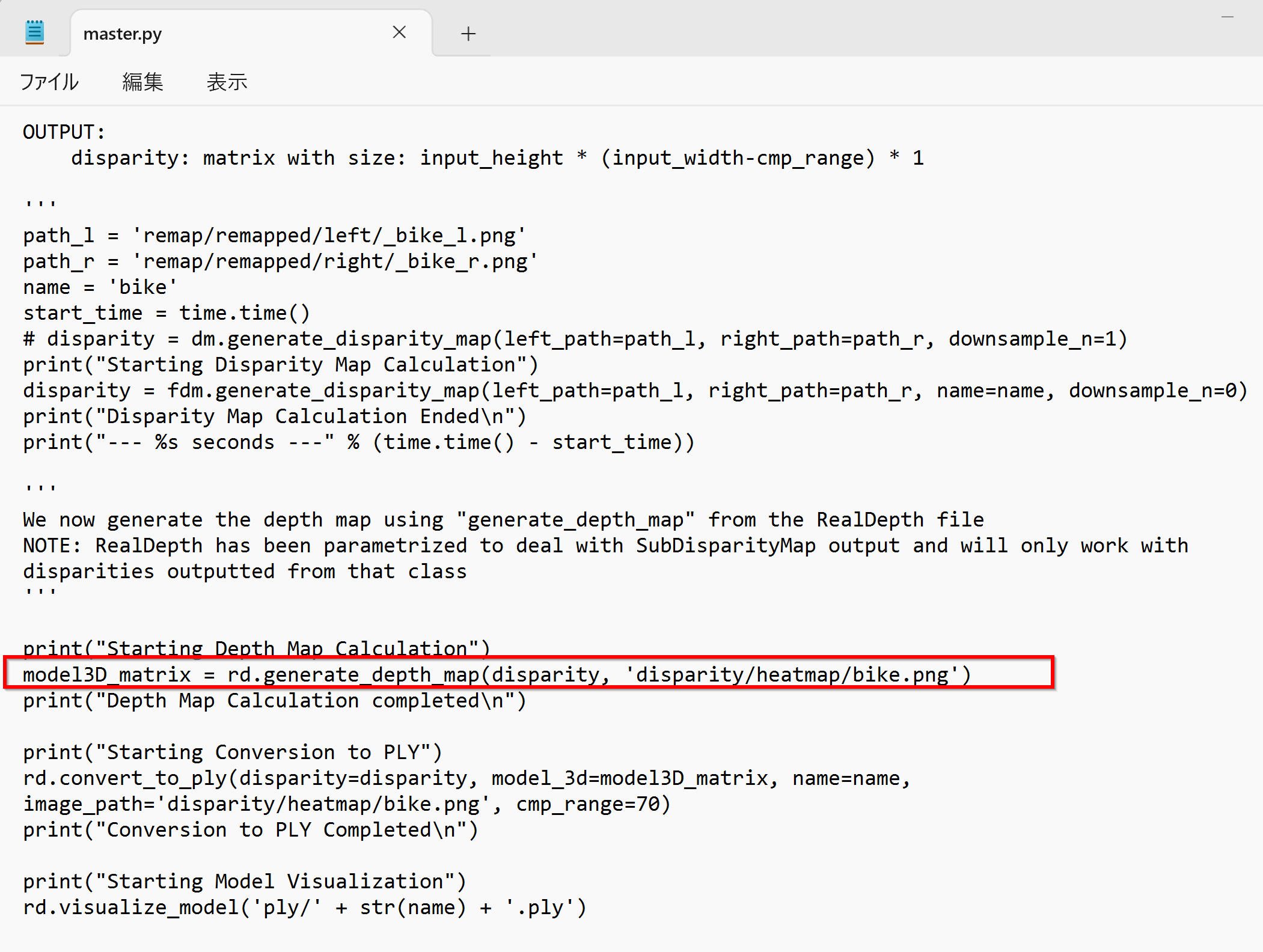
- src\master.py を実行することにより動作確認
実行の前に,ディレクトリの作成,所定のディレクトリに所定の画像を置くなどの作業を行っている.
cd /d c:%HOMEPATH% cd 3D_Reconstruction_From_Stereo_Images mkdir remap mkdir remap\remapped mkdir remap\remapped\left mkdir remap\remapped\right copy sampleRectified\left\_bike_l.png remap\remapped\left copy sampleRectified\right\_bike_r.png remap\remapped\right mkdir diparity mkdir disparity\heatmap mkdir ply src\master.py - 実行の結果,エラーメッセージが出ないことを確認
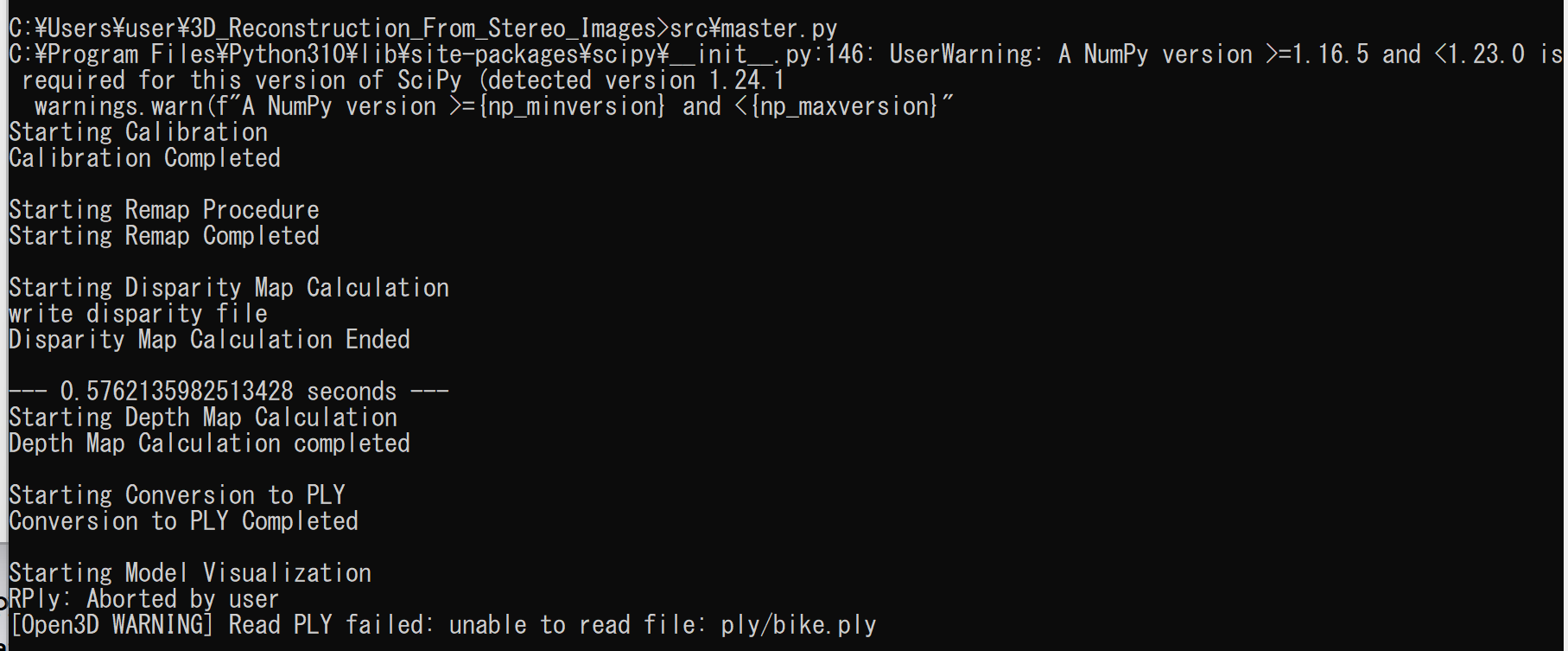
- 3次元モデルが表示される.
マウスで回転などができる.


- 次のコマンドで,使用したステレオ画像を表示
remap\remapped\left\_bike_l.png remap\remapped\right\_bike_r.png

- 次のコマンドで,視差マップ (disparity map) を表示
disparity\heatmap\bike.png
別の画像で試してみる.
以下書きかけ
- src\left, src\right 下に png 形式の画像を準備
cd /d c:%HOMEPATH% cd 3D_Reconstruction_From_Stereo_Images cd src mkdir remap mkdir remap\remapped mkdir remap\remapped\left mkdir remap\remapped\right cd remap\remapped cd left curl -O https://raw.githubusercontent.com/opencv/opencv/master/samples/data/aloeL.jpg cd .. cd right curl -O https://raw.githubusercontent.com/opencv/opencv/master/samples/data/aloeR.jpg - png に変換
- disparity map
次の Python プログラムを実行cd /d c:%HOMEPATH% cd 3D_Reconstruction_From_Stereo_Images cd src mkdir disparity mkdir disparity\heatmap mkdir plyimport FastDP as fdm path_l = 'remap/remapped/left/aloeL.jpg' path_r = 'remap/remapped/right/aloeR.jpg' name = 'aloe' disparity = fdm.generate_disparity_map(left_path=path_l, right_path=path_r, name=name, downsample_n=0) exit() -
disparity\heatmap\aloe.png - depth map
import FastDP as fdm import RealDepth as rd path_l = 'remap/remapped/left/aloeL.jpg' path_r = 'remap/remapped/right/aloeR.jpg' name = 'aloe' disparity = fdm.generate_disparity_map(left_path=path_l, right_path=path_r, name=name, downsample_n=0) model3D_matrix = rd.generate_depth_map(disparity, 'disparity/heatmap/aloe.png') rd.convert_to_ply(disparity=disparity, model_3d=model3D_matrix, name=name, image_path='disparity/heatmap/aloe.png', cmp_range=70) rd.visualize_model('ply/' + str(name) + '.ply')