Ubuntu で ros のインストールとテスト実行
ROS のインストールについて説明する.
【関連する外部ページ】は http://www.ros.org/wiki/groovy/Installation/Ubuntu
前準備
Ubuntu のシステム更新
Ubuntu で OS のシステム更新を行うときは, 端末で,次のコマンドを実行する.
Ubuntu で OS のシステム更新を行うときは, 端末で,次のコマンドを実行する。これは、パッケージ情報を最新の状態に保ち、インストール済みのパッケージをセキュリティアップデートやバグ修正を含めて更新するためである。
# パッケージリストの情報を更新
sudo apt update
# インストール済みのパッケージを包括的に更新 (依存関係も考慮)
sudo apt full-upgrade
# カーネル更新等で実際に再起動が必要な場合のみ実行を推奨
# sudo shutdown -r now
ROS のインストール
端末で,次のコマンドを実行する.
- sources.list の設定
◆ Ubuntu 12.04 での操作手順(例)
詳しくは http://www.ros.org/wiki/groovy/Installation/Ubuntu
echo "deb http://packages.ros.org/ros/ubuntu precise main" | sudo tee /etc/apt/sources.list.d/ros-latest.list
- 鍵の設定
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -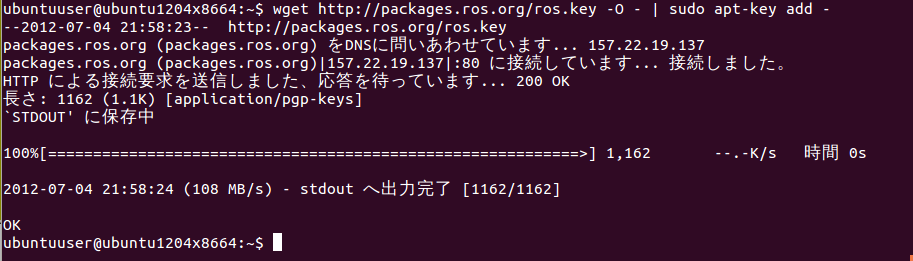
- インストール
# パッケージリストの情報を更新 sudo apt update sudo apt-get -yV upgrade sudo apt -y install ros-groovy-desktop-full - rosdep の初期化
sudo rosdep init rosdep update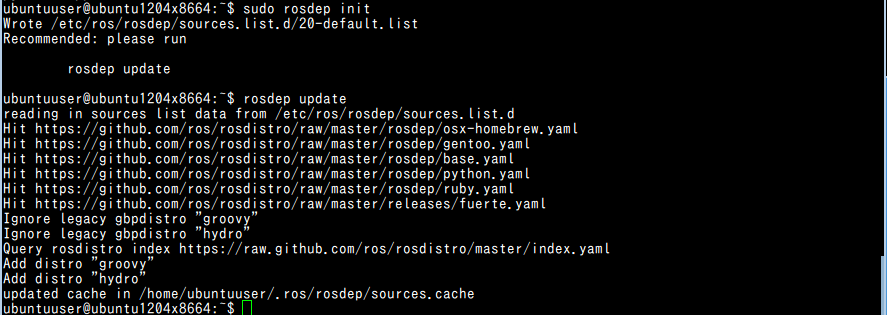
- 環境設定
echo "if [ -f /opt/ros/groovy/setup.bash ]; then" >> ~/.bashrc echo "source /opt/ros/groovy/setup.bash" >> ~/.bashrc echo "fi" >> ~/.bashrc
- rosinstall の取得
# パッケージリストの情報を更新 sudo apt update sudo apt -y install python-rosinstall - 環境変数の確認
新しい端末を開き,次のコマンドで環境変数を確認する
export | grep ROS
試しに使ってみる
- ROS ワークスペースの作成
mkdir /tmp/hoge cd /tmp/hoge mkdir src cd src catkin_init_workspace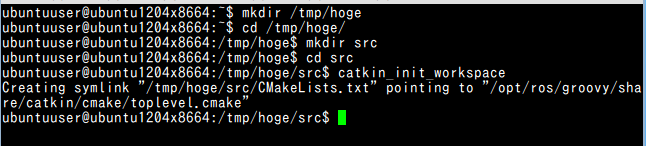
- ROS ワークスペースのビルド
cd /tmp/hoge catkin_make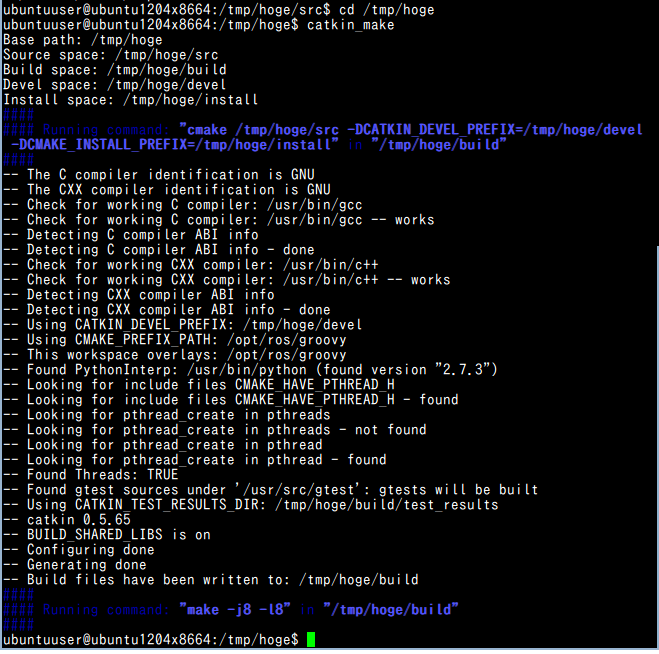
- 環境設定
source devel/setup.bash
- パッケージの作成
cd /tmp/hoge cd src catkin_create_pkg beginner_tutorials std_msgs rospy roscpp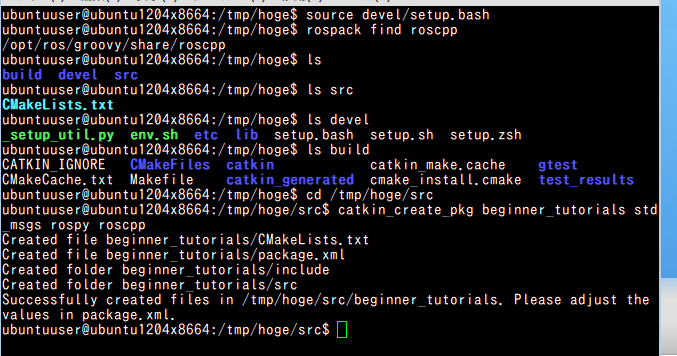
- 作成された package.xml の確認
roscd beginner_tutorials cat package.xml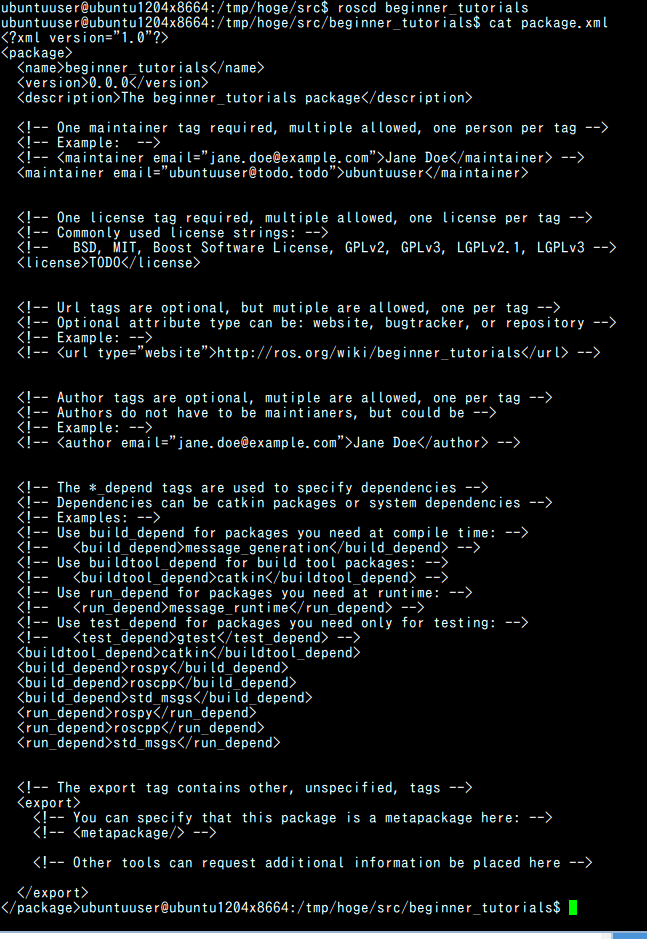
- パッケージのビルド
cd /tmp/hoge catkin_make
チュートリアルのダウンロードと実行
- チュートリアルのダウンロード
◆ Ubuntu 12.04 での操作手順(例)
# パッケージリストの情報を更新 sudo apt update sudo apt -y install ros-groovy-ros-tutorials - roscore の起動
roscore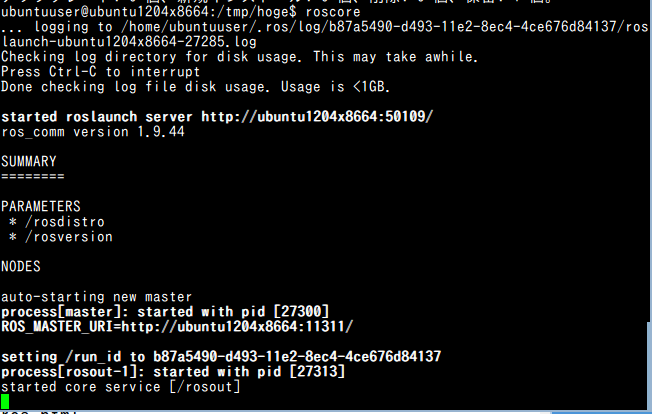
- 別の端末で rosnode list を実行してみる
「/rosout」と表示されたら OK
rosnode list
- /rosout の詳細情報の表示
rosnode info /rosout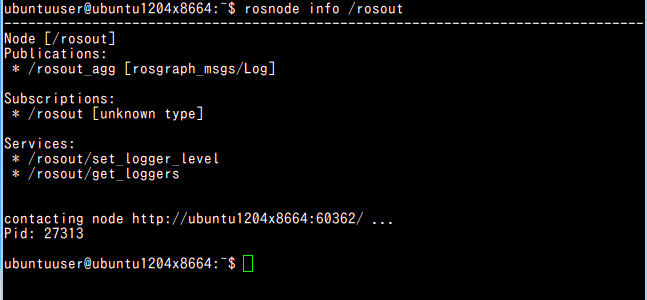
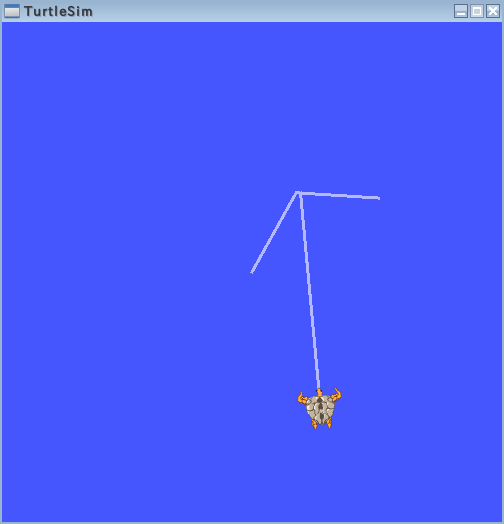
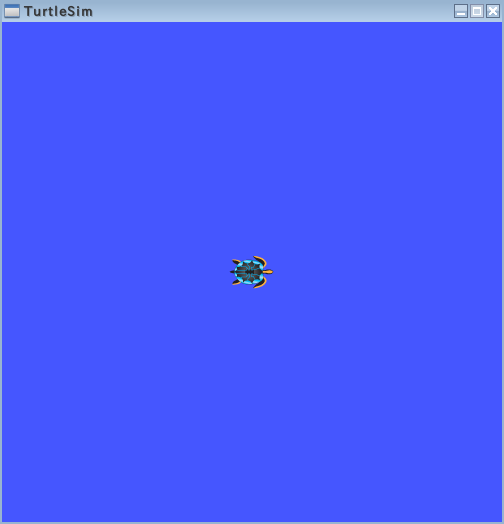
- turtlesim パッケージの起動
turtlesim_node はノード名
rosrun turtlesim turtlesim_node
- 別の端末で rosnode list を実行してみる
rosnode list
- turtle_teleop_key の追加
別の端末で次のコマンドを起動
turtle_teleop_key はノード名
rosrun turtlesim turtle_teleop_key
- いまの端末でカーソルキーを操作すると、タートルが動く