ステレオマッチング
前準備
Python 3.12 のインストール(Windows 上) [クリックして展開]
以下のいずれかの方法で Python 3.12 をインストールする。Python がインストール済みの場合、この手順は不要である。
方法1:winget によるインストール
管理者権限のコマンドプロンプトで以下を実行する。管理者権限のコマンドプロンプトを起動するには、Windows キーまたはスタートメニューから「cmd」と入力し、表示された「コマンドプロンプト」を右クリックして「管理者として実行」を選択する。
winget install --id Python.Python.3.12 -e --scope machine --silent --accept-source-agreements --accept-package-agreements --override "/quiet InstallAllUsers=1 PrependPath=1 Include_test=0 Include_pip=1 Include_launcher=1 InstallLauncherAllUsers=1 TargetDir=\"C:\Program Files\Python312\""
powershell -Command "$p='C:\Program Files\Python312'; $s=\"$p\Scripts\"; $m=[Environment]::GetEnvironmentVariable('Path','Machine'); if($m -notlike \"*$s*\") { [Environment]::SetEnvironmentVariable('Path', \"$p;$s;$m\", 'Machine') }"--scope machine を指定することで、システム全体(全ユーザー向け)にインストールされる。このオプションの実行には管理者権限が必要である。インストール完了後、コマンドプロンプトを再起動すると PATH が自動的に設定される。
方法2:インストーラーによるインストール
- Python 公式サイト(https://www.python.org/downloads/)にアクセスし、「Download Python 3.x.x」ボタンから Windows 用インストーラーをダウンロードする。
- ダウンロードしたインストーラーを実行する。
- 初期画面の下部に表示される「Add python.exe to PATH」に必ずチェックを入れてから「Customize installation」を選択する。このチェックを入れ忘れると、コマンドプロンプトから
pythonコマンドを実行できない。 - 「Install Python 3.xx for all users」にチェックを入れ、「Install」をクリックする。
インストールの確認
コマンドプロンプトで以下を実行する。
python --versionバージョン番号(例:Python 3.12.x)が表示されればインストール成功である。「'python' は、内部コマンドまたは外部コマンドとして認識されていません。」と表示される場合は、インストールが正常に完了していない。
AIエディタ Windsurf のインストール(Windows 上) [クリックして展開]
Pythonプログラムの編集・実行には、AIエディタの利用を推奨する。ここでは、Windsurfのインストールを説明する。Windsurf がインストール済みの場合、この手順は不要である。
管理者権限のコマンドプロンプトで以下を実行する。管理者権限のコマンドプロンプトを起動するには、Windows キーまたはスタートメニューから「cmd」と入力し、表示された「コマンドプロンプト」を右クリックして「管理者として実行」を選択する。
winget install --scope machine --id Codeium.Windsurf -e --silent --disable-interactivity --force --accept-source-agreements --accept-package-agreements --custom "/SP- /SUPPRESSMSGBOXES /NORESTART /CLOSEAPPLICATIONS /DIR=""C:\Program Files\Windsurf"" /MERGETASKS=!runcode,addtopath,associatewithfiles,!desktopicon"
powershell -Command "$env:Path=[System.Environment]::GetEnvironmentVariable('Path','Machine')+';'+[System.Environment]::GetEnvironmentVariable('Path','User'); windsurf --install-extension MS-CEINTL.vscode-language-pack-ja --force; windsurf --install-extension ms-python.python --force; windsurf --install-extension Codeium.windsurfPyright --force"--scope machine を指定することで、システム全体(全ユーザー向け)にインストールされる。このオプションの実行には管理者権限が必要である。インストール完了後、コマンドプロンプトを再起動すると PATH が自動的に設定される。
【関連する外部ページ】
Windsurf の公式ページ: https://windsurf.com/
前準備として,ステレオ画像を準備
- 次のWebページを使う(感謝)
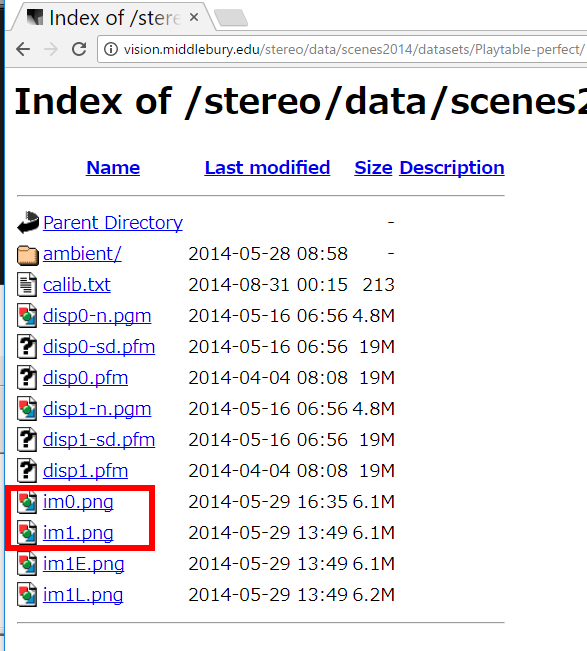
- Playtableの右横の「
Perf」をクリック 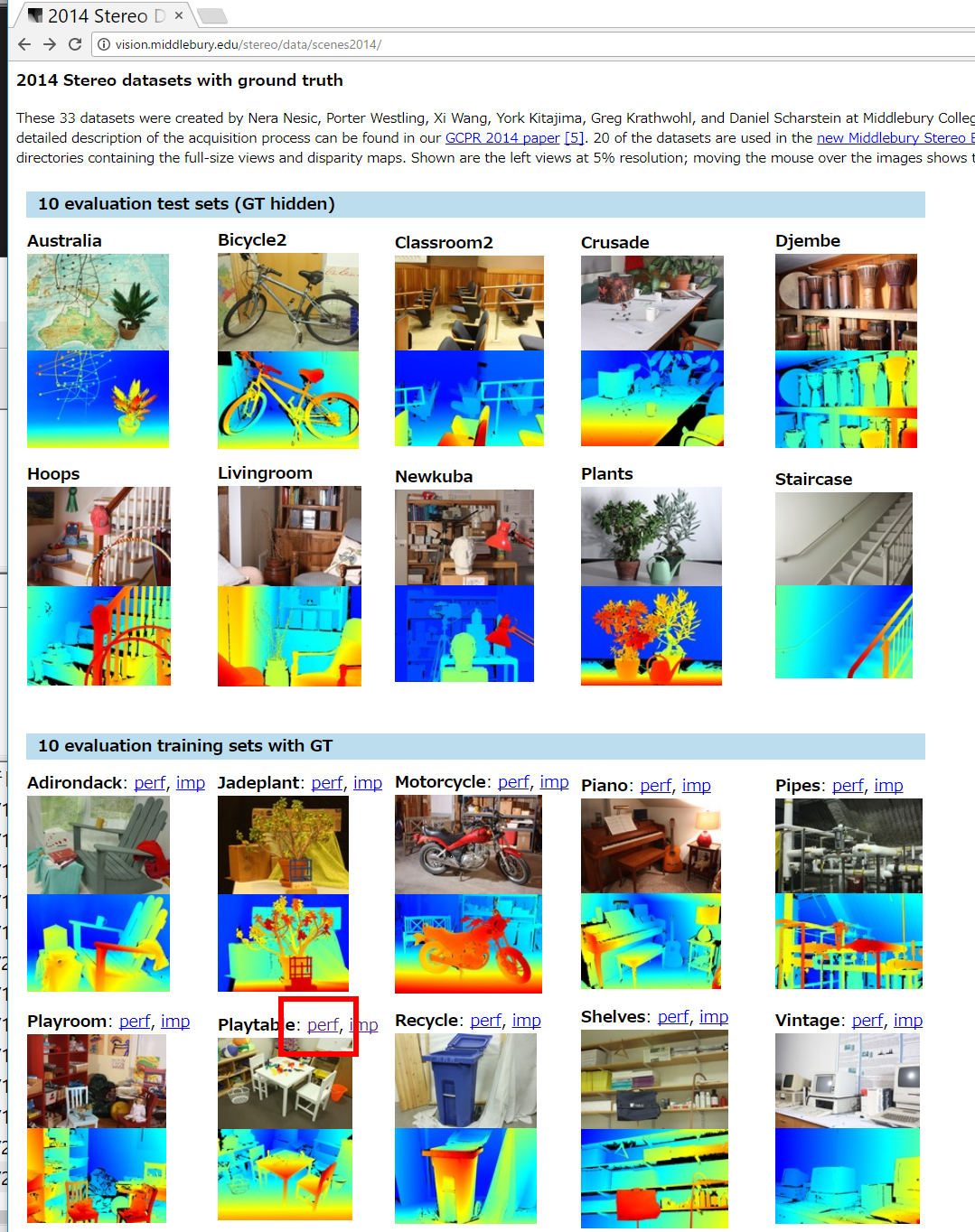
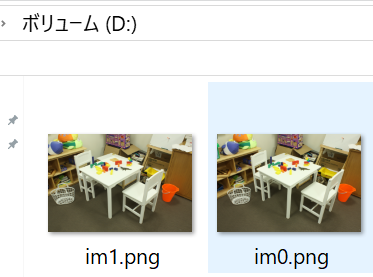
- 2つの画像ファイル im0.png と im1.png を分かりやすいディレクトリに保存する.
* 以下「D:\」 (D: の直下) に保存したものとして説明を続ける.
- ダウンロードした 2つの画像ファイルを確認
- Python プログラムの実行
- 2つの画像の横方向の連結
横方向に連結して,1つのオブジェクト gを作っている.
import cv2 im0 = cv2.imread("D:/im0.png") im1 = cv2.imread("D:/im1.png") g = cv2.hconcat([im0, im1]) cv2.imshow("hoge", g) cv2.waitKey(0) cv2.destroyAllWindows()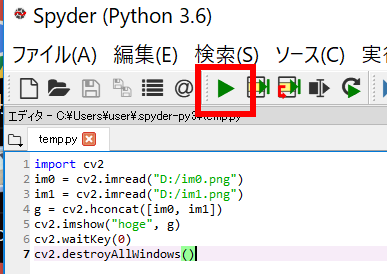
- 巨大な画面が表示されるので確認.(別のウインドウの陰になっているかもしれないので探す).
このあと,右上の「x」をクリックしない.画面の中をクリックしてから,何かのキーを押して閉じる
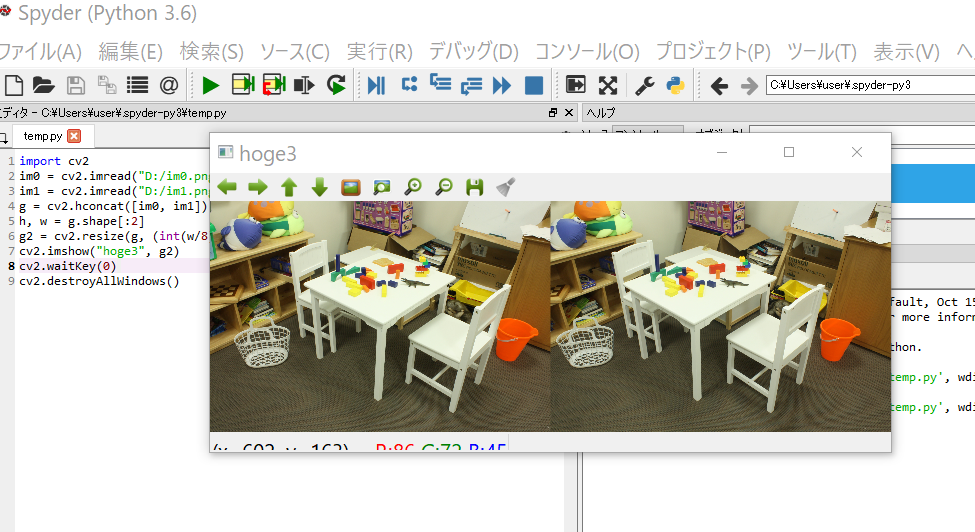
- 2つの画像の横方向の連結と画像の縮小
resize で縮小している.
「Python」で次を実行.
import cv2 im0 = cv2.imread("D:/im0.png") im1 = cv2.imread("D:/im1.png") g = cv2.hconcat([im0, im1]) h, w = g.shape[:2] g2 = cv2.resize(g, (int(w/8), int(h/8))) cv2.imshow("hoge3", g2) cv2.waitKey(0) cv2.destroyAllWindows()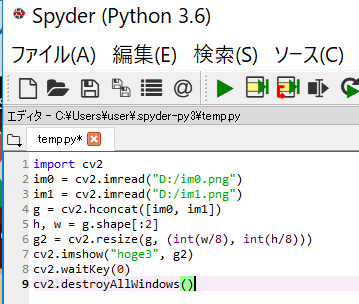
- 画面が表示されるので確認.(別のウインドウの陰になっているかもしれないので探す).
このあと,右上の「x」をクリックしない.画面の中をクリックしてから,何かのキーを押して閉じる
- 2つのカラー画像の差(RGB成分の差)の絶対値と画像の縮小
「Python」で次を実行.
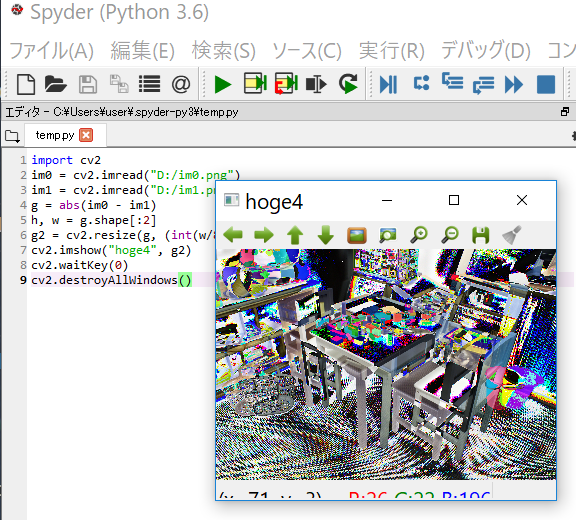
import cv2 im0 = cv2.imread("D:/im0.png") im1 = cv2.imread("D:/im1.png") g = abs(im0 - im1) h, w = g.shape[:2] g2 = cv2.resize(g, (int(w/8), int(h/8))) cv2.imshow("hoge4", g2) cv2.waitKey(0) cv2.destroyAllWindows()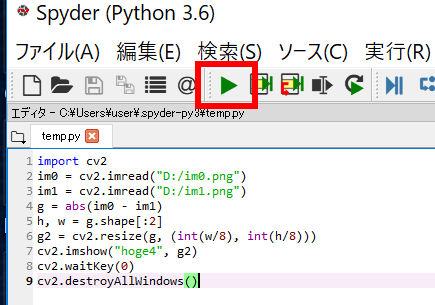
- 画面が表示されるので確認.(別のウインドウの陰になっているかもしれないので探す).
2つのカラー画像の差の絶対値なので,結果もカラー画像
こうして表示してみると,確かに,画像がずれていることが確認できる.
このあと,右上の「x」をクリックしない.画面の中をクリックしてから,何かのキーを押して閉じる
Depth Map
「
Depth Map」とは 距離を画素の濃淡で示したもの.以下の実習では - 近いものは白
- 遠いものは黒
で表示する.
ブロックマッチング (Block Matching) 法による DepthMap の生成
「Python」で次を実行.
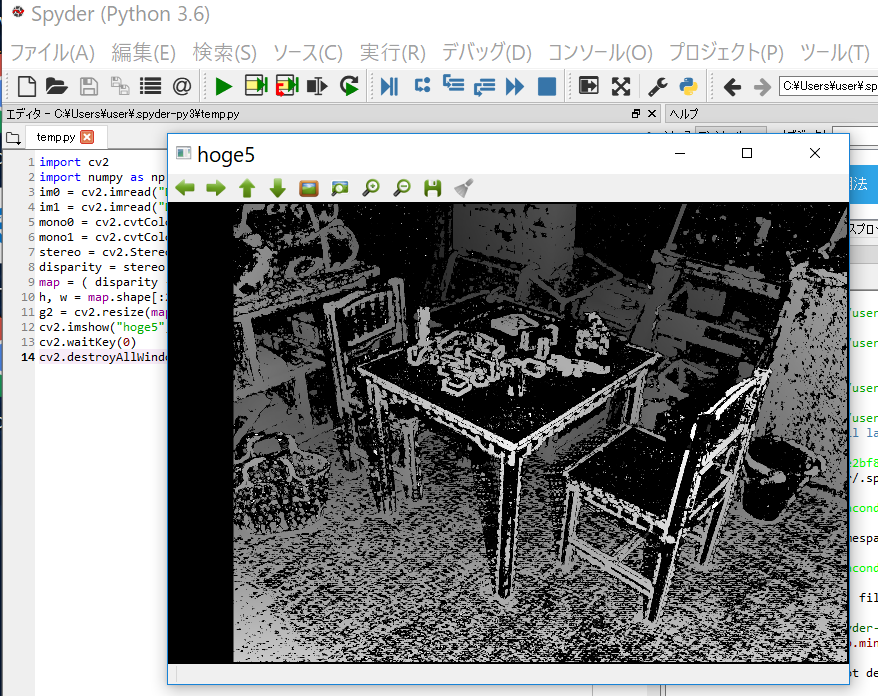
import cv2 import numpy as np im0 = cv2.imread("D:/im0.png") im1 = cv2.imread("D:/im1.png") mono0 = cv2.cvtColor(im0, cv2.COLOR_BGR2GRAY) mono1 = cv2.cvtColor(im1, cv2.COLOR_BGR2GRAY) stereo = cv2.StereoBM_create(numDisparities=256, blockSize=15) disparity = stereo.compute(mono0, mono1) map = ( disparity - np.min(disparity) ) / ( np.max(disparity) - np.min(disparity) ) h, w = map.shape[:2] g2 = cv2.resize(map, (int(w/4), int(h/4))) cv2.imshow("hoge5", g2) cv2.waitKey(0) cv2.destroyAllWindows()
- 画面が表示されるので確認.(別のウインドウの陰になっているかもしれないので探す).
結果をみると,あまり,うまくいっていない.
このあと,右上の「x」をクリックしない.画面の中をクリックしてから,何かのキーを押して閉じる
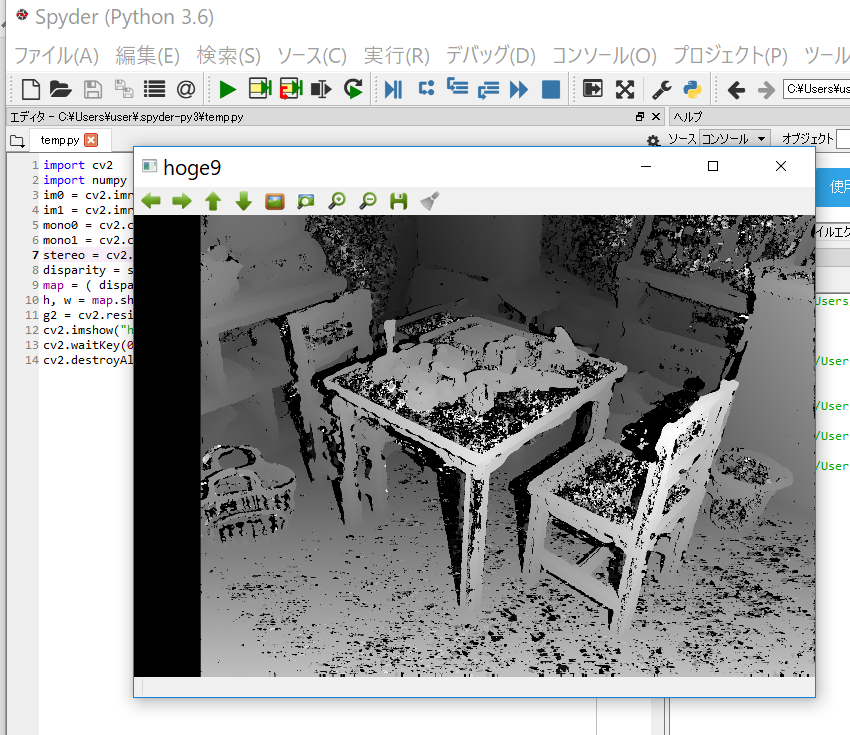
セミグローバルブロックマッチング (Semi Global Block Matching) 法による DepthMap の生成
「Python」で次を実行.
import cv2 import numpy as np im0 = cv2.imread("D:/im0.png") im1 = cv2.imread("D:/im1.png") mono0 = cv2.cvtColor(im0, cv2.COLOR_BGR2GRAY) mono1 = cv2.cvtColor(im1, cv2.COLOR_BGR2GRAY) stereo = cv2.StereoSGBM_create(minDisparity = 10, numDisparities=256, blockSize=22) disparity = stereo.compute(mono0, mono1) map = ( disparity - np.min(disparity) ) / ( np.max(disparity) - np.min(disparity) ) h, w = map.shape[:2] g2 = cv2.resize(map, (int(w/4), int(h/4))) cv2.imshow("hoge9", g2) cv2.waitKey(0) cv2.destroyAllWindows()
- 画面が表示されるので確認.(別のウインドウの陰になっているかもしれないので探す).
結果をみると,あまり,うまくいっていない.
このあと,右上の「x」をクリックしない.画面の中をクリックしてから,何かのキーを押して閉じる
- 2つの画像ファイル im0.png と im1.png を分かりやすいディレクトリに保存する.
youtube で配布されている side by side 形式動画ファイル
- 次のWebページを開く
- Voyager_3d_sbs.wmv をダウンロード
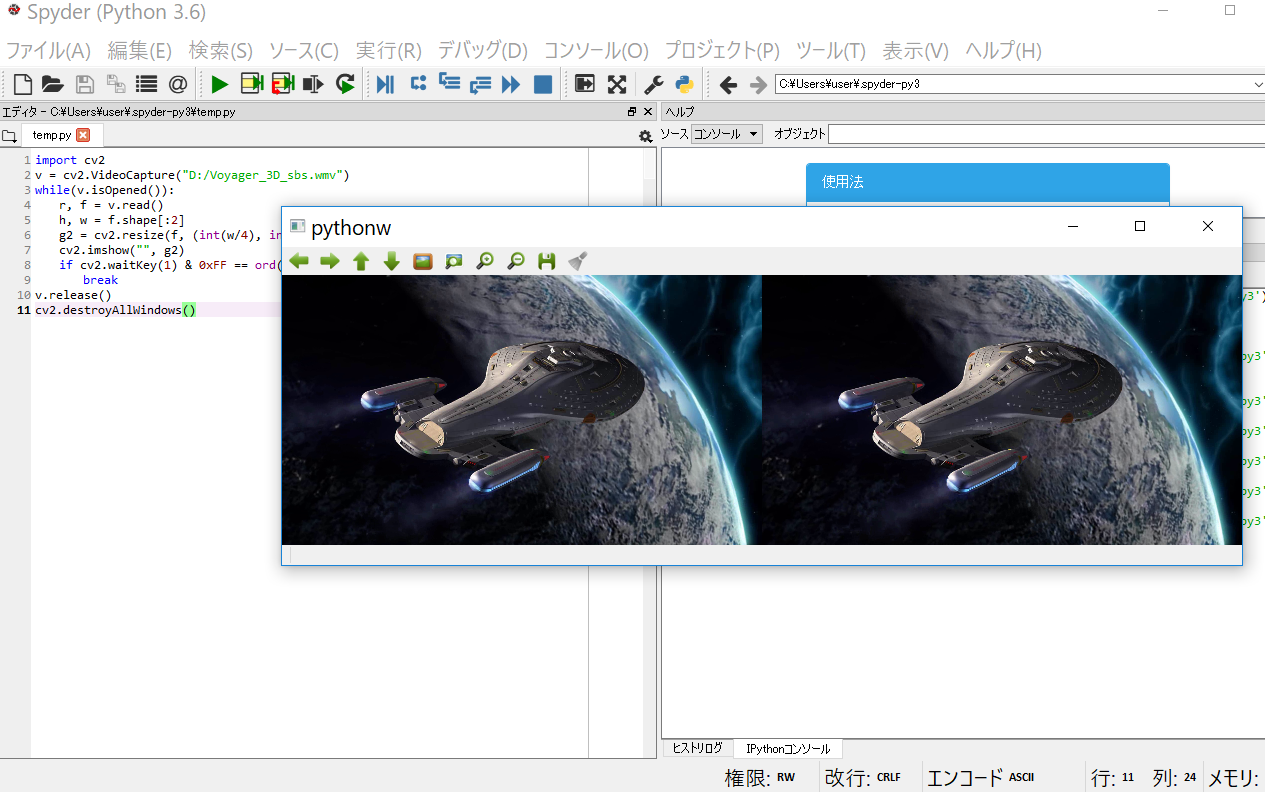
- 1/4倍に縮小+再生
「Python」で次を実行.
OpenCV による動画表示を行う.
import cv2 v = cv2.VideoCapture("D:/Voyager_3D_sbs.wmv") while(v.isOpened()): r, f = v.read() if ( r == False ): break h, w = f.shape[:2] g2 = cv2.resize(f, (int(w/4), int(h/4))) cv2.imshow("", g2) # Press Q to exit if cv2.waitKey(1) & 0xFF == ord('q'): break v.release() cv2.destroyAllWindows()
- 結果を確認する
途中で止めたいとき,右上の「x」をクリックしない.画面の中をクリックしてから,「q」のキーを押して閉じる
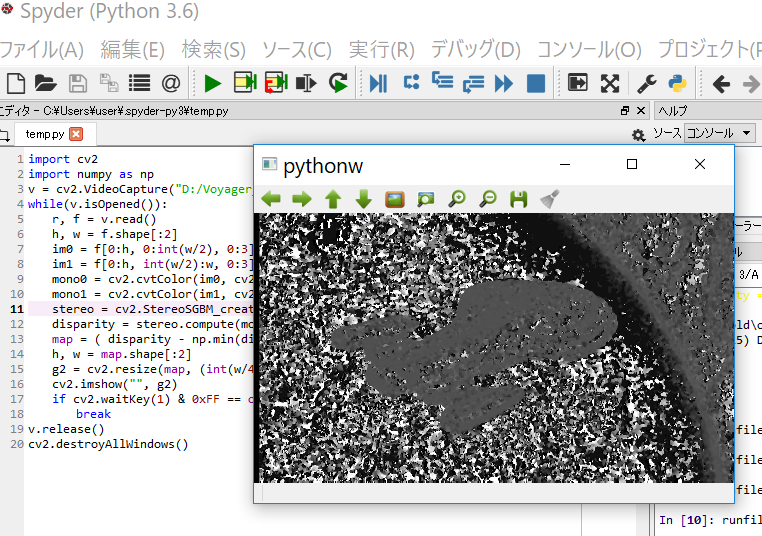
- セミグローバルブロックマッチング (Semi Global Block Matching) 法による DepthMap の生成
「Python」で次を実行.
import cv2 import numpy as np v = cv2.VideoCapture("D:/Voyager_3D_sbs.wmv") while(v.isOpened()): r, f = v.read() if ( r == False ): break h, w = f.shape[:2] im0 = f[0:h, 0:int(w/2), 0:3] im1 = f[0:h, int(w/2):w, 0:3] mono0 = cv2.cvtColor(im0, cv2.COLOR_BGR2GRAY) mono1 = cv2.cvtColor(im1, cv2.COLOR_BGR2GRAY) stereo = cv2.StereoSGBM_create(minDisparity = 5, numDisparities=16, blockSize=10) disparity = stereo.compute(mono0, mono1) map = ( disparity - np.min(disparity) ) / ( np.max(disparity) - np.min(disparity) ) h, w = map.shape[:2] g2 = cv2.resize(map, (int(w/4), int(h/4))) cv2.imshow("", g2) # Press Q to exit if cv2.waitKey(1) & 0xFF == ord('q'): break v.release() cv2.destroyAllWindows()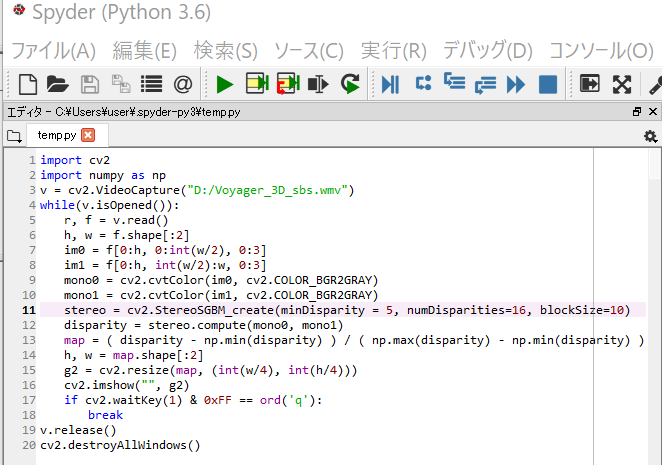
- 結果を確認する
途中で止めたいとき,右上の「x」をクリックしない.画面の中をクリックしてから,「q」のキーを押して閉じる