カメラのステレオマッチング(OpenCV,Python を使用)
前準備
Python 64 ビット版のインストール,pip と setuptools の更新(Windows 上)
Windows での Python 3.10 のインストール,pip と setuptools の更新: 別ページ »で説明
Python の公式ページ: https://www.python.org/
Python 開発環境のインストール
- Windows での Python 開発環境として,Jupyter Qt Console, Jupyter ノートブック (Jupyter Notebook), Jupyter Lab, Nteract, spyder のインストール: 別ページ »で説明
- Windows での PyCharm のインストール: 別ページ »で説明
- Windows での PyScripter のインストール: 別ページ »で説明
opencv-python パッケージのインストール
- Windows では,コマンドプロンプトを管理者として実行する.
- opencv-python パッケージのインストール
* Windows では「python」,Ubuntu では「sudo python3 -m pip」
python -m pip install -U opencv-python opencv-contrib-python

カメラ画像の表示
パソコン接続できるビデオカメラ 2台を準備し,パソコンに接続しておく.
- Python プログラムの実行
- 次を実行
OpenCV による動画表示を行う.
import cv2 import numpy as np v0 = cv2.VideoCapture(0) v1 = cv2.VideoCapture(1) while( ( v0.isOpened() ) and ( v1.isOpened() ) ): r0, bgr0 = v0.read() if ( r0 == False ): break r1, bgr1 = v1.read() if ( r1 == False ): break cv2.imshow("0", bgr0) cv2.imshow("1", bgr1) # Press Q to exit if cv2.waitKey(1) & 0xFF == ord('q'): break v0.release() v1.release() cv2.destroyAllWindows()* 止めたいとき,右上の「x」をクリックしない.画面の中をクリックしてから,「q」のキーを押して閉じる
OpenCV の POC (PhaseCorrelate) を用いて、ステレオ画像の位置合わせ
ステレオ画像のうち1枚を、平行移動による位置合わせ
import cv2
import numpy as np
v0 = cv2.VideoCapture(0)
v1 = cv2.VideoCapture(1)
while( ( v0.isOpened() ) and ( v1.isOpened() ) ):
r0, bgr0 = v0.read()
if ( r0 == False ):
break
r1, bgr1 = v1.read()
if ( r1 == False ):
break
mono0 = cv2.cvtColor(bgr0, cv2.COLOR_BGR2GRAY)
mono1 = cv2.cvtColor(bgr1, cv2.COLOR_BGR2GRAY)
f0 = np.array( mono0, dtype='float32')
f1 = np.array( mono1, dtype='float32')
dxdy, response = cv2.phaseCorrelate(f0, f1)
print(dxdy[0], dxdy[1])
bgr0after = cv2.warpAffine(bgr0, np.float32([[1, 0, dxdy[0]], [0, 1, dxdy[1]]]), (f0.shape[1], f0.shape[0]))
cv2.imshow("bgr0", bgr0)
cv2.imshow("bgr1", bgr1)
cv2.imshow("bgr0after", bgr0after)
# Press Q to exit
if cv2.waitKey(1) & 0xFF == ord('q'):
break
v0.release()
v1.release()
cv2.destroyAllWindows()
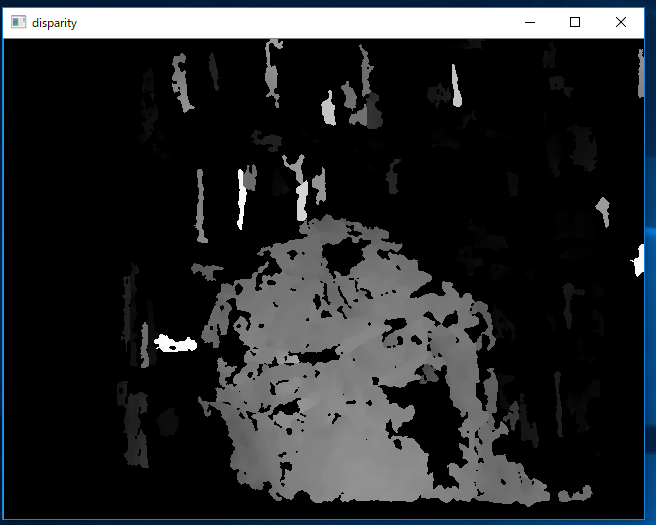
ステレオマッチングによる距離画像の生成
OpenCV による動画表示を行う.
import cv2
import numpy as np
v0 = cv2.VideoCapture(0)
v1 = cv2.VideoCapture(1)
while( ( v0.isOpened() ) and ( v1.isOpened() ) ):
r0, bgr0 = v0.read()
if ( r0 == False ):
break
r1, bgr1 = v1.read()
if ( r1 == False ):
break
mono0 = cv2.cvtColor(bgr0, cv2.COLOR_BGR2GRAY)
mono1 = cv2.cvtColor(bgr1, cv2.COLOR_BGR2GRAY)
f0 = np.array( mono0, dtype='float32')
f1 = np.array( mono1, dtype='float32')
dxdy, response = cv2.phaseCorrelate(f0, f1)
print(dxdy[0], dxdy[1])
bgr0after = cv2.warpAffine(bgr0, np.float32([[1, 0, dxdy[0]], [0, 1, dxdy[1]]]), (bgr0.shape[1], bgr0.shape[0]))
window_size = 3
min_disp = 16
num_disp = 112-min_disp
stereo = cv2.StereoSGBM_create(minDisparity = min_disp,
numDisparities = num_disp,
blockSize = 8,
P1 = 8*3*window_size**2,
P2 = 32*3*window_size**2,
disp12MaxDiff = 1,
uniquenessRatio = 10,
speckleWindowSize = 200,
speckleRange = 1
)
disparity = stereo.compute(bgr0after, bgr1).astype(np.float32) / 16.0
cv2.imshow("bgr0", bgr0)
cv2.imshow("bgr1", bgr1)
cv2.imshow("bgr0after", bgr0after)
cv2.imshow('disparity', (disparity-min_disp)/num_disp)
# Press Q to exit
if cv2.waitKey(1) & 0xFF == ord('q'):
break
v0.release()
v1.release()
cv2.destroyAllWindows()
* 止めたいとき,右上の「x」をクリックしない.画面の中をクリックしてから,「q」のキーを押して閉じる