ROS を用いた Kinect の操作
ROS を用いた Kinect の操作について説明する.
前準備
-
Ubuntu で OS のシステム更新を行うときは,
次のコマンドを実行.
# パッケージリストの情報を更新 sudo apt update # インストール済みのパッケージを包括的に更新 (依存関係も考慮) sudo apt full-upgrade # 変更をシステム全体に確実に反映させるために再起動 sudo shutdown -r now - ROS のインストール
ROS 用の OpenNI ドライバと Kinect ドライバのインストール
ROS 用の OpenNI ドライバと Kinect ドライバを、次の手順でインストールする。
【関連する外部ページ】 http://www.ros.org/wiki/openni_kinect の記述に従う
- 関連パッケージのインストール
# パッケージリストの情報を更新 sudo apt update sudo apt -y install ros-groovy-openni-launch sudo apt -y install ros-groovy-openni-tracker sudo apt -y install ros-groovy-openni-camera sudo apt -y install ros-groovy-depth-image-proc sudo apt -y install ros-groovy-jsk-openni-kinect - PrimeSense OpenNI ドライバのインストール
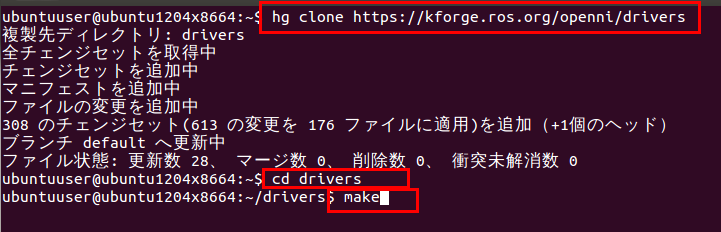
まず、下記の操作で、ソースコードのダウンロードとビルドを行う.
cd /tmp hg clone https://kforge.ros.org/openni/drivers cd drivers makeビルドが終わったら、エラーメッセージが出ていないことを確認する
次の手順でインストールする
sudo make -k install - OpenNI Kinect のインストール(ソースコードを使用)
- 環境変数 ROS_PACKAGE_PATH の確認
echo $ROS_PACKAGE_PATH
- ソースコードのチェックアウト
ソースコードは、ROS_PACKAGE_PATH のパスにチェックアウトする
◆ 実行手順例
cd /opt/ros/groovy/share sudo hg clone https://kforge.ros.org/openni/openni_ros sudo chown -R $USER opeenni_ros
- ビルド
◆ 実行手順例
cd openni_ros rosdep install nite rosdep install kinect rosmake nite
- 環境変数 ROS_PACKAGE_PATH の確認
- 起動してみる
roslaunch openni_launch openni.launch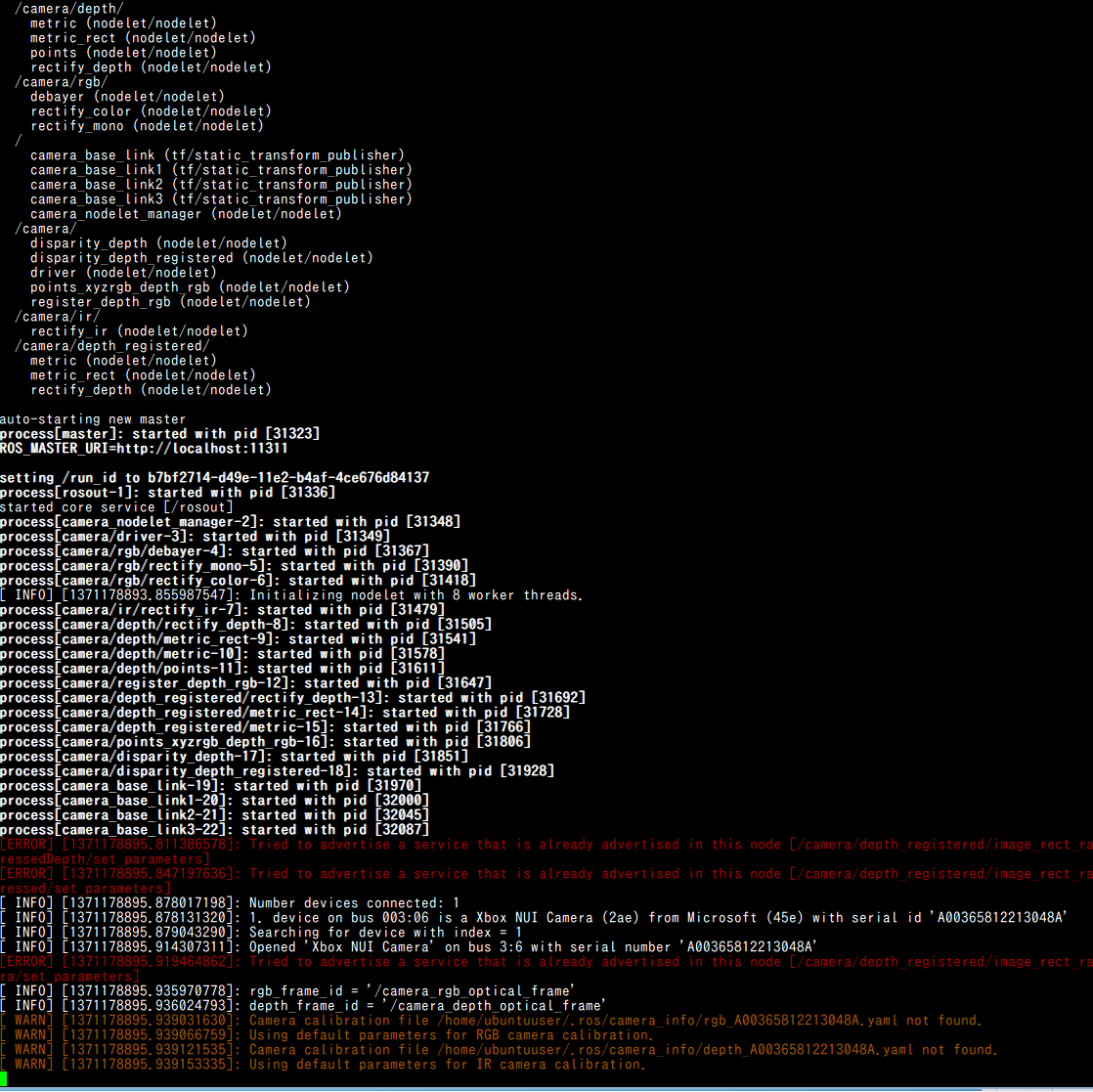
- ノードレット情報の表示
別の端末で、次のコマンドを実行
rosnode info /camera_nodelet_manager | grep rgb | sort rosnode info /camera_nodelet_manager | grep ir | sort rosnode info /camera_nodelet_manager | grep depth | sort - image_view で表示してみる
rosrun image_view image_view image:=/camera/rgb/image_color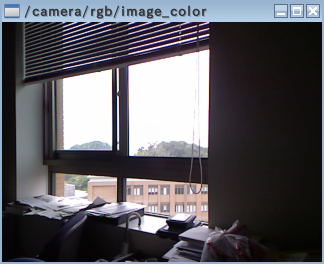
rosrun image_view image_view image:=/camera/rgb/image_mono
rosrun image_view image_view image:=/camera/rgb/image_raw
rosrun image_view image_view image:=/camera/depth/image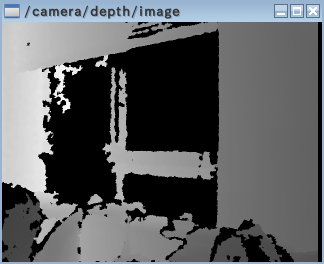
以下、古い情報
(参考) ROS 用の OpenNI ドライバと Kinect ドライバをソースコードからビルドしたい場合 (古い情報です。参考のため載せています)
- rosinstall のインストール
sudo easy_install -U rosinstall vcstools
- ROS 用の OpenNI ドライバと Kinect ドライバのダウンロードとビルド
◆ Ubuntu での操作手順例
# パッケージリストの情報を更新 sudo apt update sudo apt -y install mercurial hg clone https://kforge.ros.org/openni/drivers cd drivers make sudo make install
(途中省略)
- ROS 用の OpenNI ドライバと Kinect ドライバのインストール
◆ Ubuntu での操作手順例
sudo -i make install
- (オプション) Debian パッケージの作成
◆ Ubuntu での操作手順例
sudo -i make debian dpkg -i *.deb
http://www.ros.org/wiki/openni_launch http://www.ros.org/wiki/openni_camera http://www.ros.org/wiki/openni_tracker
使ってみる
sudo chmod -R 777 /dev/bus/usb/*

roscore