在Linux上安装Kinect的
Kinect的安装
- 的操作系,入安装向,如下所示
我ROS作Kinect的
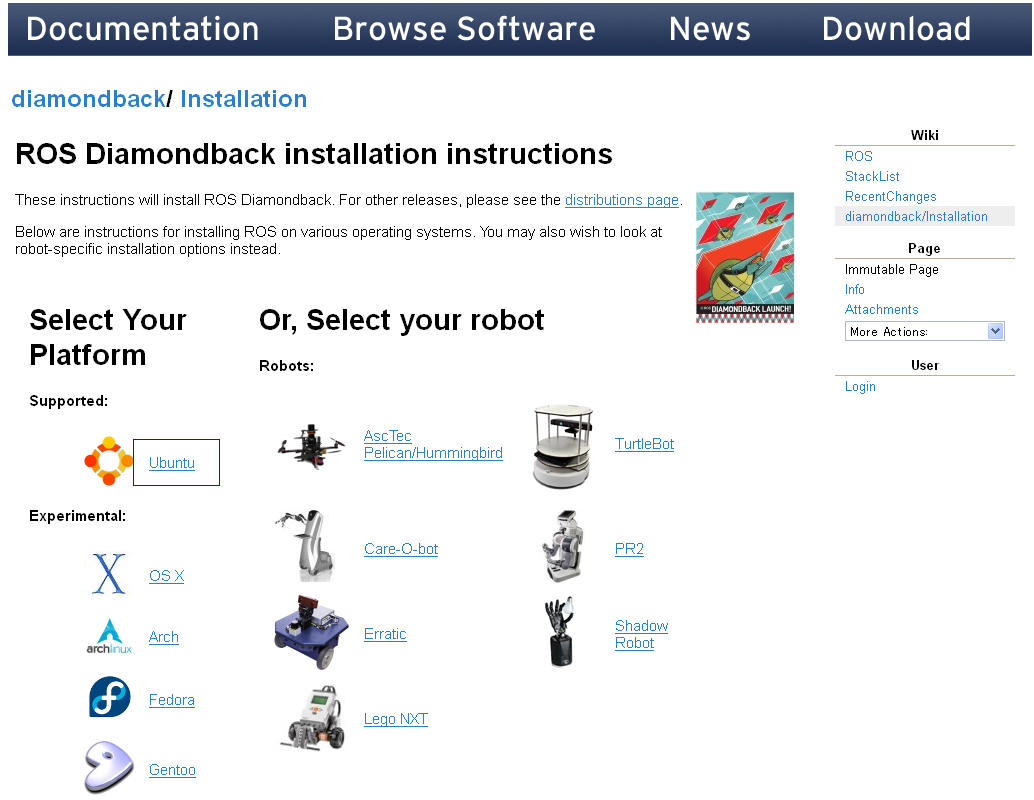
打http://www.ros.org/wiki/,"Install"
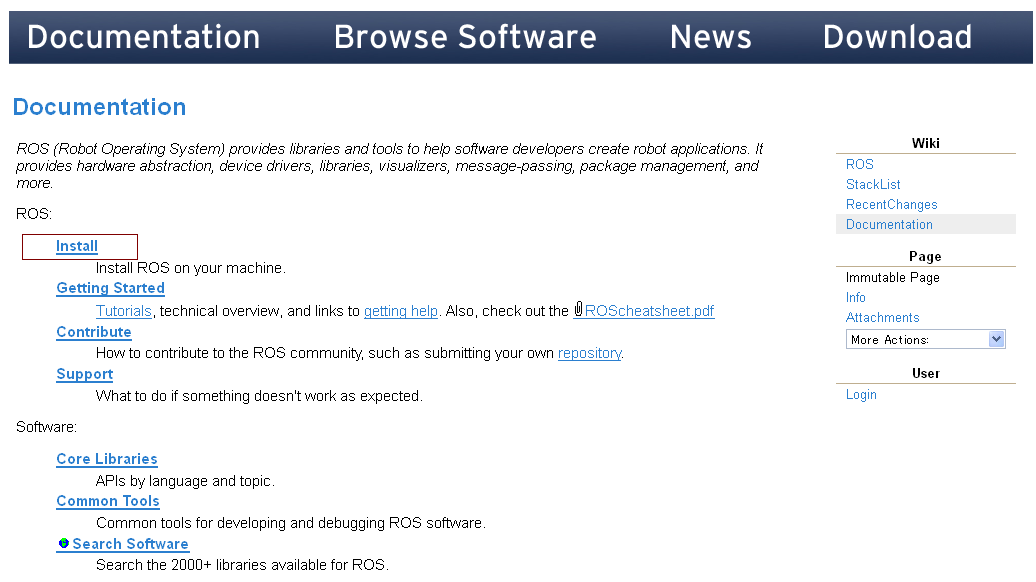
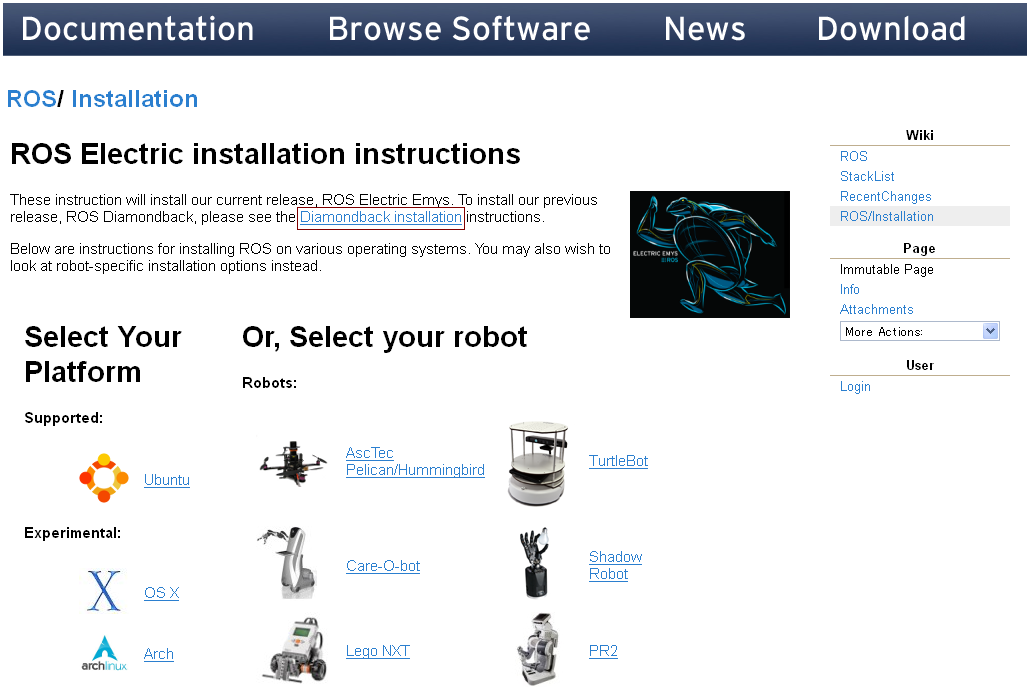
以下是本机的安装程:
-
1.将ROS的的地址添加到本机
-
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu lucid main" > /etc/apt/sources.list.d/ros-latest.list'
-
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
-
sudo apt -y update
-
sudo apt -y install ros-diamondback-desktop-full
-
sudo apt -y install ros-diamondback-openni-kinect
ROC的OpenNI
-
rosmake openni_camera
-
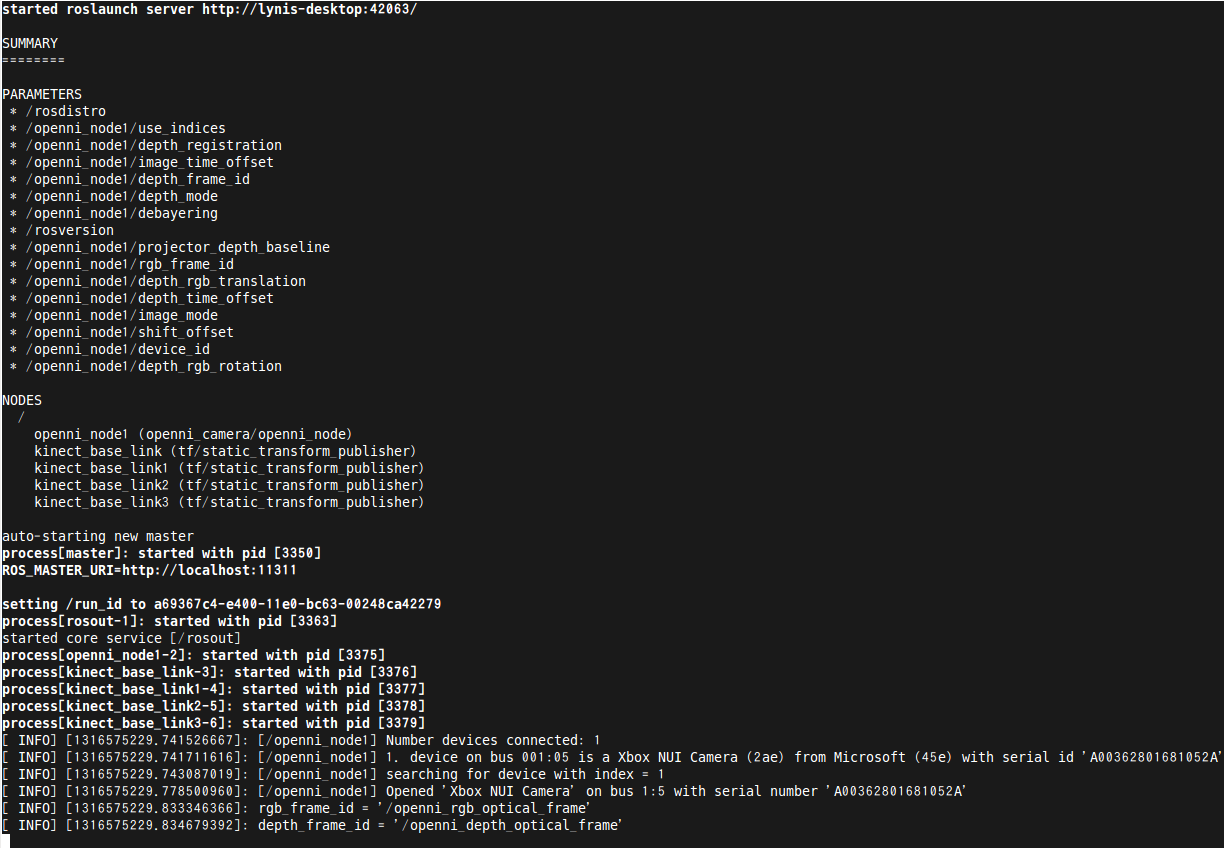
roslaunch openni_camera openni_node.launch
-
首先我来行OpenNI的示例
cd OpenNI/Samples/Bin/Release
./NiViewer
出如下信息

-
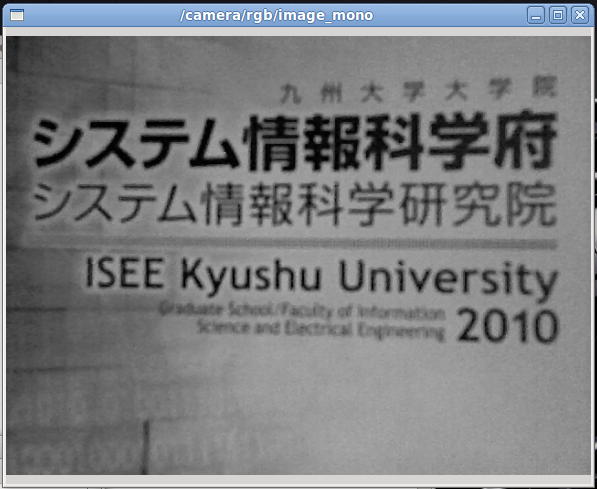
然后,我ROS自的程序image_view来安装是否成功。image_view在/opt/ros/diamondback/stacks/image_pipeline/image_view目下。 在端行rosrun image_view image_view image:=/camera/rgb/image_mono
-
在端行rosrun image_view image_view image:=/camera/rgb/image_mono,果如下