OpenCV でビデオのフレーム間差分,トラッキングビジョン,オプティカルフロー(Python を使用)
1. エグゼクティブサマリー
OpenCV と Python を使用して,ビデオのフレーム間差分,トラッキングビジョン,オプティカルフロー(Farneback の方法,DIS optical flow),フレーム間差分による動体検出(二値化)を実現するプログラムを解説する.各プログラムは動画ファイルとパソコン接続ビデオカメラの両方に対応している.
本記事で扱う内容は以下のとおりである.
- 動画ファイルの表示
- 連続フレームの差分表示(フレーム間差分)
- トラッキングビジョン(Shi-Tomasi の手法による追跡用の点の抽出)
- オプティカルフロー(Farneback の方法による動きの情報の抽出)
- DIS optical flow
- フレーム間差分による動体検出(二値化)
- OpenCV の公式ページ: https://opencv.org
- GitHub の OpenCV のページ: https://github.com/opencv/opencv/releases
【サイト内の関連ページ】
- OpenCV について [PDF] , [パワーポイント]
- OpenCVとPythonを活用した画像・ビデオ処理プログラム: 別ページ »
Python 3.12 のインストール
Pythonのインストールを行い、Pythonのプログラムを実行する環境を整える。扱う環境は、Windows搭載パソコンである。金子研究室では、Python 3.12.10を推奨する。
[Windows での Python 3.12 のインストール手順を見るには、ここをクリック]
Windows での Python 3.12 のインストール
以下のいずれかの方法でPython 3.12をインストールする。Pythonがインストール済みの場合、この手順は不要である。
方法 1:winget によるインストール
【インストールコマンドの実行方法】
管理者権限でコマンドプロンプトを起動する(手順:Windowsキーまたはスタートメニュー → cmd と入力 → 右クリック → 「管理者として実行」)。そして、コマンド全体をコマンドプロンプトにコピー&ペーストする。
--scope machine を指定することで、システム全体(全ユーザー向け)にインストールされる。このオプションの実行には管理者権限が必要である。インストール完了後、コマンドプロンプトを再起動するとPATHが反映される。
REM Python 3.12 をシステム領域にインストール
winget install --id Python.Python.3.12 -e --scope machine --silent --accept-source-agreements --accept-package-agreements --override "/quiet InstallAllUsers=1 PrependPath=1 Include_test=0 Include_pip=1 Include_launcher=1 InstallLauncherAllUsers=1 TargetDir=\"C:\Program Files\Python312\""
REM Python と Scripts を PATH 先頭に追加
powershell -NoProfile -Command "$p='C:\Program Files\Python312'; $s=\"$p\Scripts\"; $c=[Environment]::GetEnvironmentVariable('Path','Machine'); if((Test-Path $p) -and (';'+$c+';' -notlike \"*;$p;*\") -and (';'+$c+';' -notlike \"*;$s;*\")){[Environment]::SetEnvironmentVariable('Path',\"$p;$s;$c\",'Machine')}"
方法 2:インストーラーによるインストール
- Python公式サイト(https://www.python.org/downloads/)にアクセスし、「Download Python 3.x.x」ボタンからWindows用インストーラーをダウンロードする。
- ダウンロードしたインストーラーを実行する。
- 初期画面の下部に表示される「Add python.exe to PATH」にチェックを入れてから「Customize installation」を選択する。このチェックを入れ忘れると、コマンドプロンプトから
pythonコマンドを実行できない。 - 「Install Python 3.xx for all users」にチェックを入れ、「Install」をクリックする。
インストールの確認
コマンドプロンプトで以下を実行する。
python --versionバージョン番号(例:Python 3.12.x)が表示されればインストール成功である。「'python' は、内部コマンドまたは外部コマンドとして認識されていません。」と表示される場合は、インストールが正常に完了していない。
Python の開発環境 Visual Studio Code のインストールと Python 用の設定
Python の開発環境Visual Studio Code(プログラムを編集するソフトウェア。以下、VS Code)を整える。
[Windows での Visual Studio Code のインストールと Python 用の設定手順を見るには、ここをクリック]
Windows での Visual Studio Code のインストールと Python 用の設定手順
1. VS Code と拡張機能のインストール
以下のコマンドにより,既存の VS Code を削除し,全ユーザー共有の設定で再インストールしたうえで,拡張機能(VS Code に機能を追加するソフトウェア)をまとめて導入する.
【インストールコマンドの実行方法】
管理者権限でコマンドプロンプトを起動する(手順:Windows キーまたはスタートメニュー → cmd と入力 → 右クリック → 「管理者として実行」)。そして,コマンド全体をコマンドプロンプトにコピー&ペーストする。
インストールコマンド
REM ============================================================
REM Microsoft Visual Studio Code
REM ============================================================
winget uninstall -e --id Microsoft.VisualStudioCode --silent --disable-interactivity --accept-source-agreements
rmdir /s /q C:\ProgramData\vscode-extensions 2>nul
rmdir /s /q "%APPDATA%\Code" 2>nul
rmdir /s /q "%USERPROFILE%\.vscode" 2>nul
rmdir /s /q "%LOCALAPPDATA%\Microsoft\vscode-update" 2>nul
REM VS Code をシステム領域に新規インストール
winget install --scope machine --id Microsoft.VisualStudioCode -e --silent --accept-source-agreements --accept-package-agreements
REM 全ユーザー共有の拡張機能フォルダ
mkdir C:\ProgramData\vscode-extensions 2>nul
icacls "C:\ProgramData\vscode-extensions" /grant "Everyone:(OI)(CI)M" /T
REM スタートメニューのショートカットを --extensions-dir 付きで再作成
rmdir /s /q "C:\ProgramData\Microsoft\Windows\Start Menu\Programs\Visual Studio Code" 2>nul
del "C:\ProgramData\Microsoft\Windows\Start Menu\Programs\Visual Studio Code.lnk" 2>nul
powershell -NoProfile -Command "$s=New-Object -ComObject WScript.Shell; $lnk=$s.CreateShortcut('C:\ProgramData\Microsoft\Windows\Start Menu\Programs\Visual Studio Code.lnk'); $lnk.TargetPath='C:\Program Files\Microsoft VS Code\Code.exe'; $lnk.Arguments='--extensions-dir \"C:\ProgramData\vscode-extensions\"'; $lnk.Save()"
REM ショートカットの検証
powershell -NoProfile -Command "$s=New-Object -ComObject WScript.Shell; $lnk=$s.CreateShortcut('C:\ProgramData\Microsoft\Windows\Start Menu\Programs\Visual Studio Code.lnk'); Write-Host 'TargetPath:' $lnk.TargetPath; Write-Host 'Arguments:' $lnk.Arguments"
REM ファイル / フォルダ右クリックの「Code で開く」を登録
reg add "HKLM\SOFTWARE\Classes\*\shell\VSCode\command" /ve /d "\"C:\Program Files\Microsoft VS Code\Code.exe\" --extensions-dir \"C:\ProgramData\vscode-extensions\" \"%1\"" /f
reg add "HKLM\SOFTWARE\Classes\Directory\shell\VSCode\command" /ve /d "\"C:\Program Files\Microsoft VS Code\Code.exe\" --extensions-dir \"C:\ProgramData\vscode-extensions\" \"%1\"" /f
reg add "HKLM\SOFTWARE\Classes\Directory\Background\shell\VSCode\command" /ve /d "\"C:\Program Files\Microsoft VS Code\Code.exe\" --extensions-dir \"C:\ProgramData\vscode-extensions\" \"%V\"" /f
REM --extensions-dir 付きで起動する code.cmd ラッパを作成
REM (%* を echo で書くと対話的 cmd で失われるため、PowerShell で [char]37+'*' を書き出す)
powershell -NoProfile -Command "$pct=[char]37; $q=[char]34; $c='@echo off'+[char]13+[char]10+$q+'C:\Program Files\Microsoft VS Code\bin\code.cmd'+$q+' --extensions-dir '+$q+'C:\ProgramData\vscode-extensions'+$q+' '+$pct+'*'+[char]13+[char]10; [IO.File]::WriteAllText('C:\ProgramData\vscode-extensions\vscode.cmd',$c,[Text.Encoding]::ASCII)"
REM 拡張機能のインストール
set "CODE=C:\Program Files\Microsoft VS Code\bin\code.cmd"
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --uninstall-extension GitHub.copilot
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --uninstall-extension GitHub.copilot-chat
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --install-extension ms-python.python
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --install-extension ms-python.vscode-pylance
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --install-extension ms-python.debugpy
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --install-extension MS-CEINTL.vscode-language-pack-ja
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --install-extension saoudrizwan.claude-dev
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --install-extension rust-lang.rust-analyzer
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --install-extension tamasfe.even-better-toml
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --install-extension anthropic.claude-code
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --install-extension almenon.arepl
"%CODE%" --extensions-dir "C:\ProgramData\vscode-extensions" --list-extensions --show-versions
echo === セットアップ完了 ===
2. Python インタプリタの選択
同一マシンに複数の Python がインストールされている場合,VS Code で使用する Python 本体(インタプリタ:Python プログラムを解釈・実行するソフトウェア)を選択する必要がある.
- コマンドパレット(コマンド名で機能を呼び出す VS Code の入力欄)を開く(
Ctrl+Shift+P) Python: Select Interpreterと入力する
- 表示される一覧から,使用する Python(例:
C:\Program Files\Python312\python.exe)を選択する.
Python プログラム実行手順
[Windows での Python プログラム実行手順を見るには、ここをクリック]
Windows での Python 実行手順(Visual Studio Codeを使用)
プログラムファイルの作成と保存
- 左サイドバーの「エクスプローラー」アイコン(
Ctrl+Shift+E)をクリックする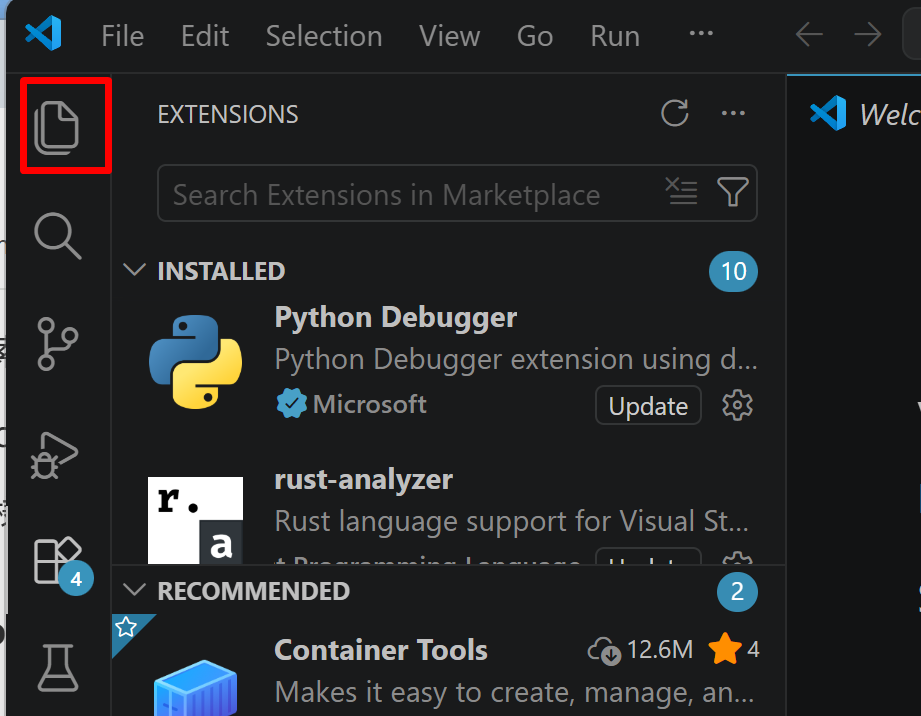
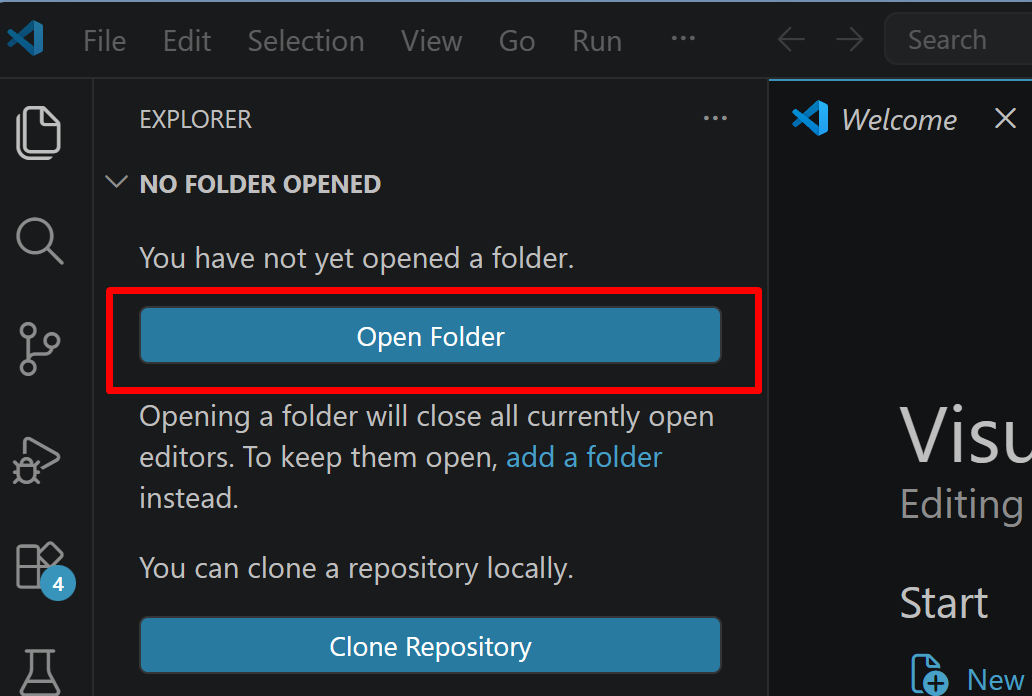
- 「NO FOLDER OPENED」(作業対象フォルダが未選択の状態)と表示される場合は,「Open Folder」をクリックし,プログラムを保存するフォルダを選択する
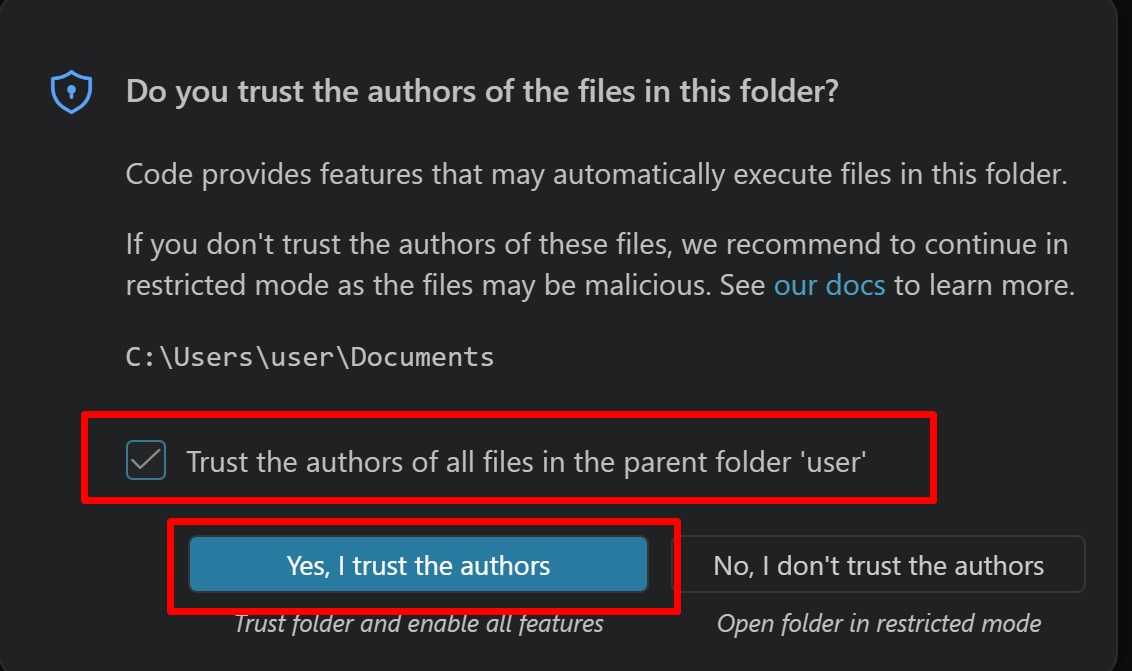
続いて「フォルダを信用するか」を確認する画面(フォルダ内のコードを実行してよいか確認する VS Code の仕組み)が表示されるので,チェックして Yes を選択する
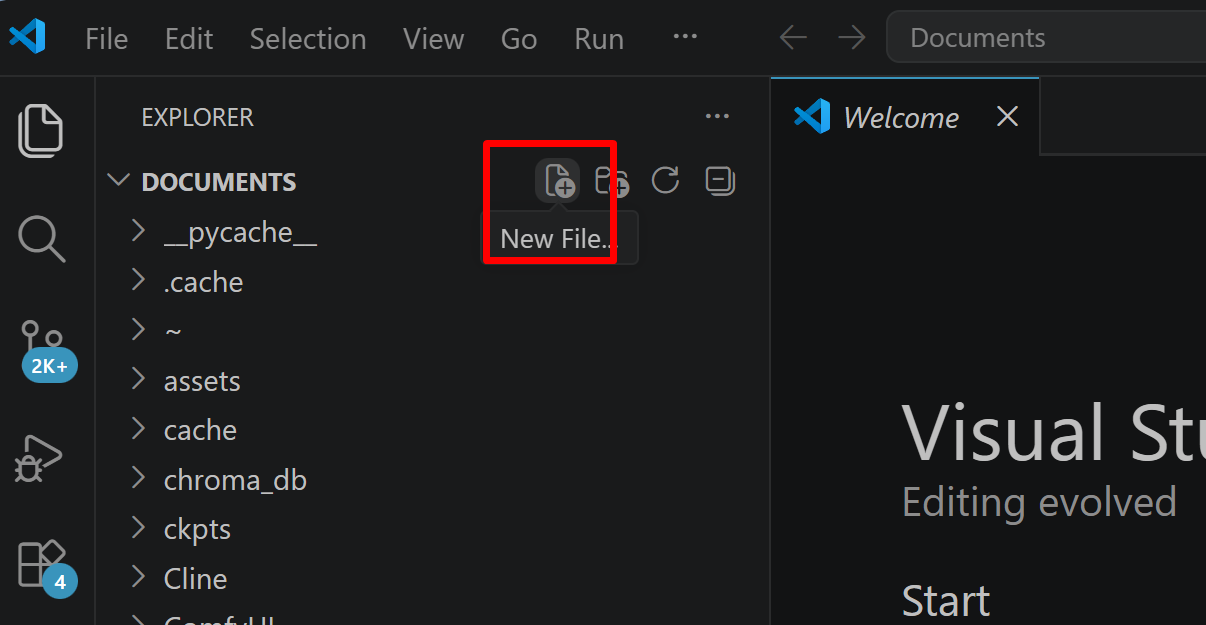
- フォルダ名の右側に表示される「新しいファイル」アイコンをクリックする
- ファイル名(例:
aitask.py.ファイル名は何でも良い)を入力しEnterを押す.拡張子は.py(Python ファイルを示す拡張子)とする
- 実行したいコードを選択し,
Ctrl+Cでコピーする.VS Code のエディタ領域にCtrl+Vで貼り付ける Ctrl+Sで保存する
プログラムの実行
- エディタ右上の三角形「▷」アイコン(Run Python File:現在開いている Python ファイルを実行するボタン)をクリックする.または,エディタ上で右クリックし「ターミナルで Python ファイルを実行」を選択する
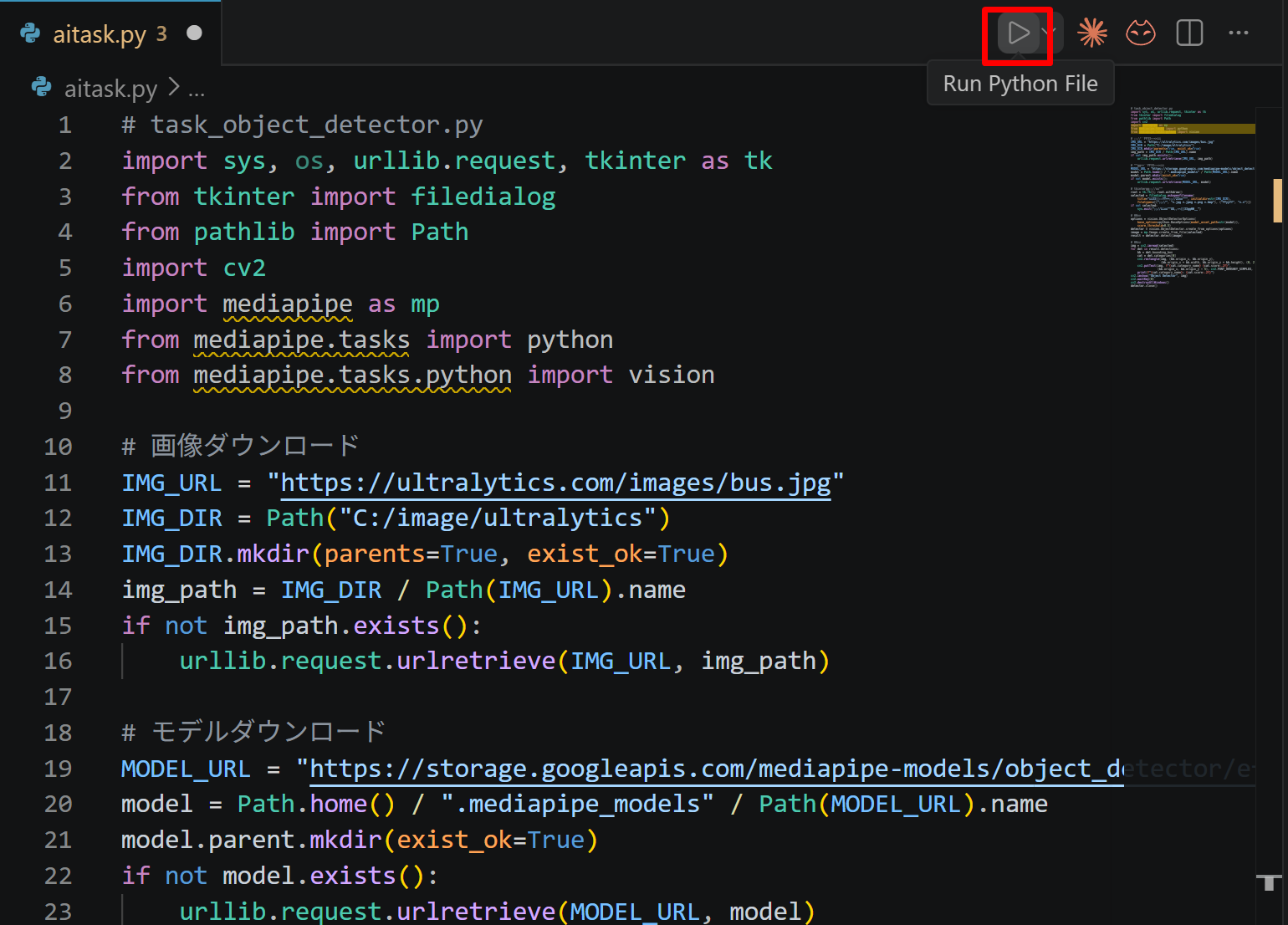
- VS Code 下部のターミナル(コマンドの入出力を表示する画面)に,実行結果(
print関数の出力等)が表示される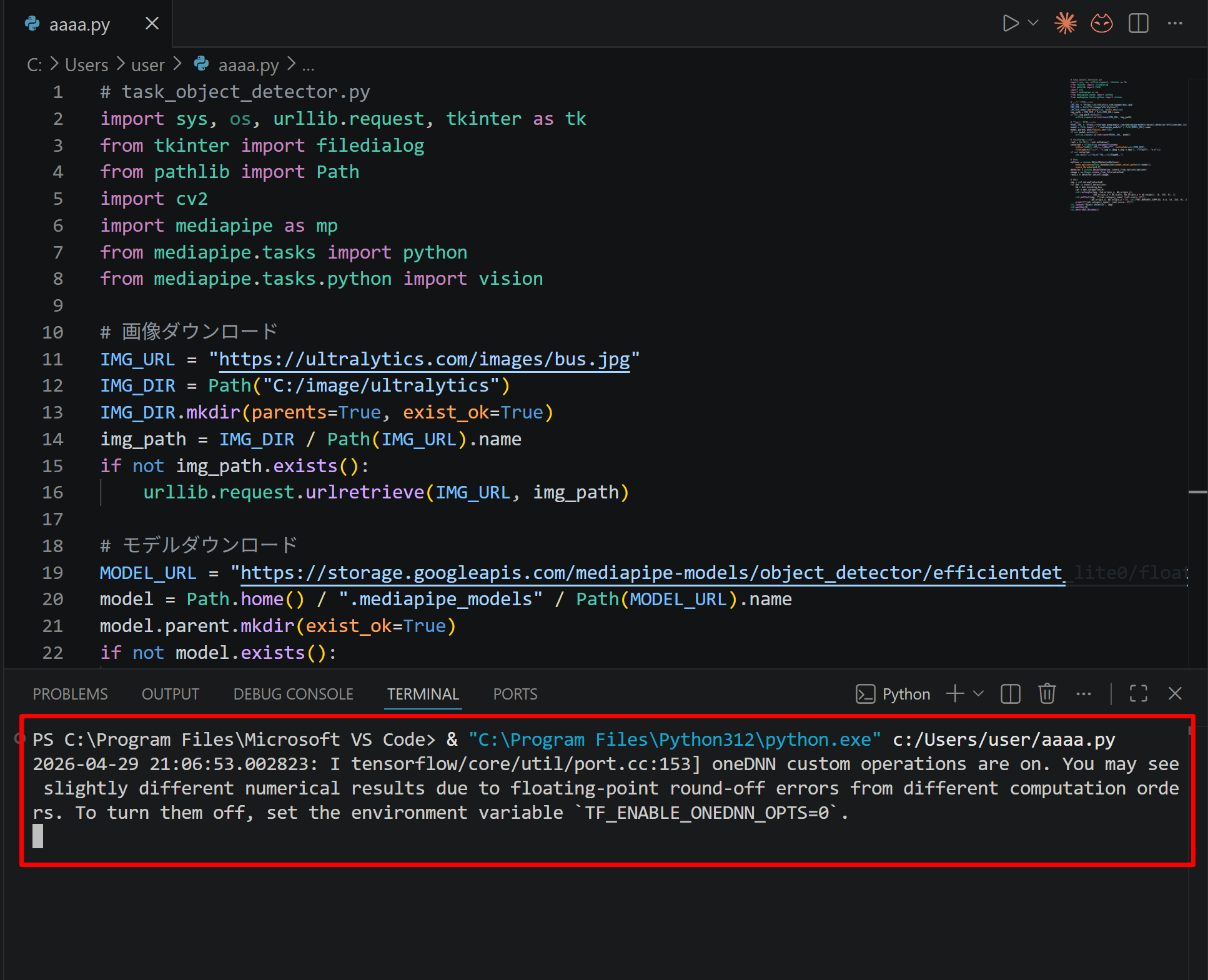
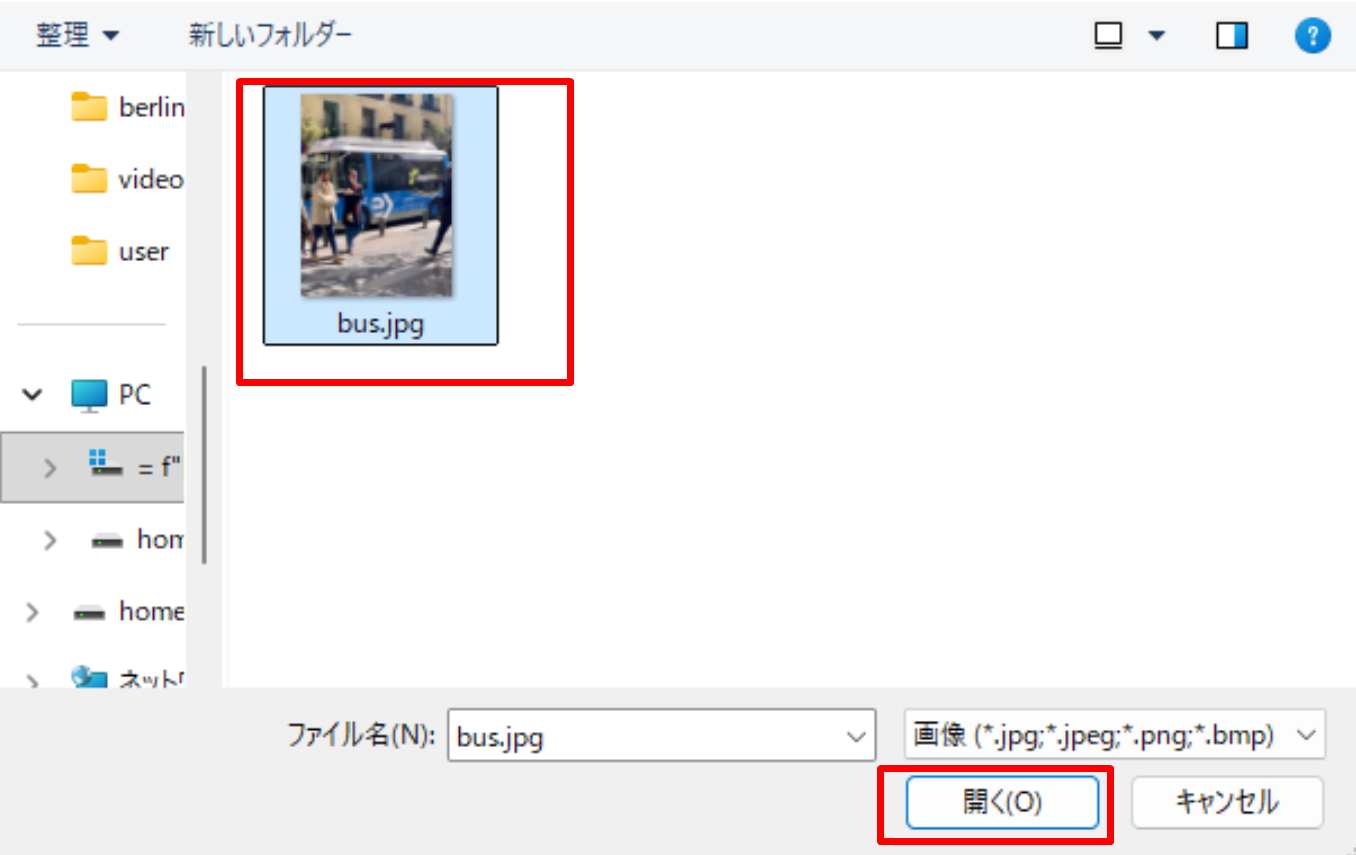
- tkinter(Python 標準の GUI ライブラリ)のファイル選択ダイアログを使うプログラムを実行した場合は,ダイアログが開くので対象画像を選択する
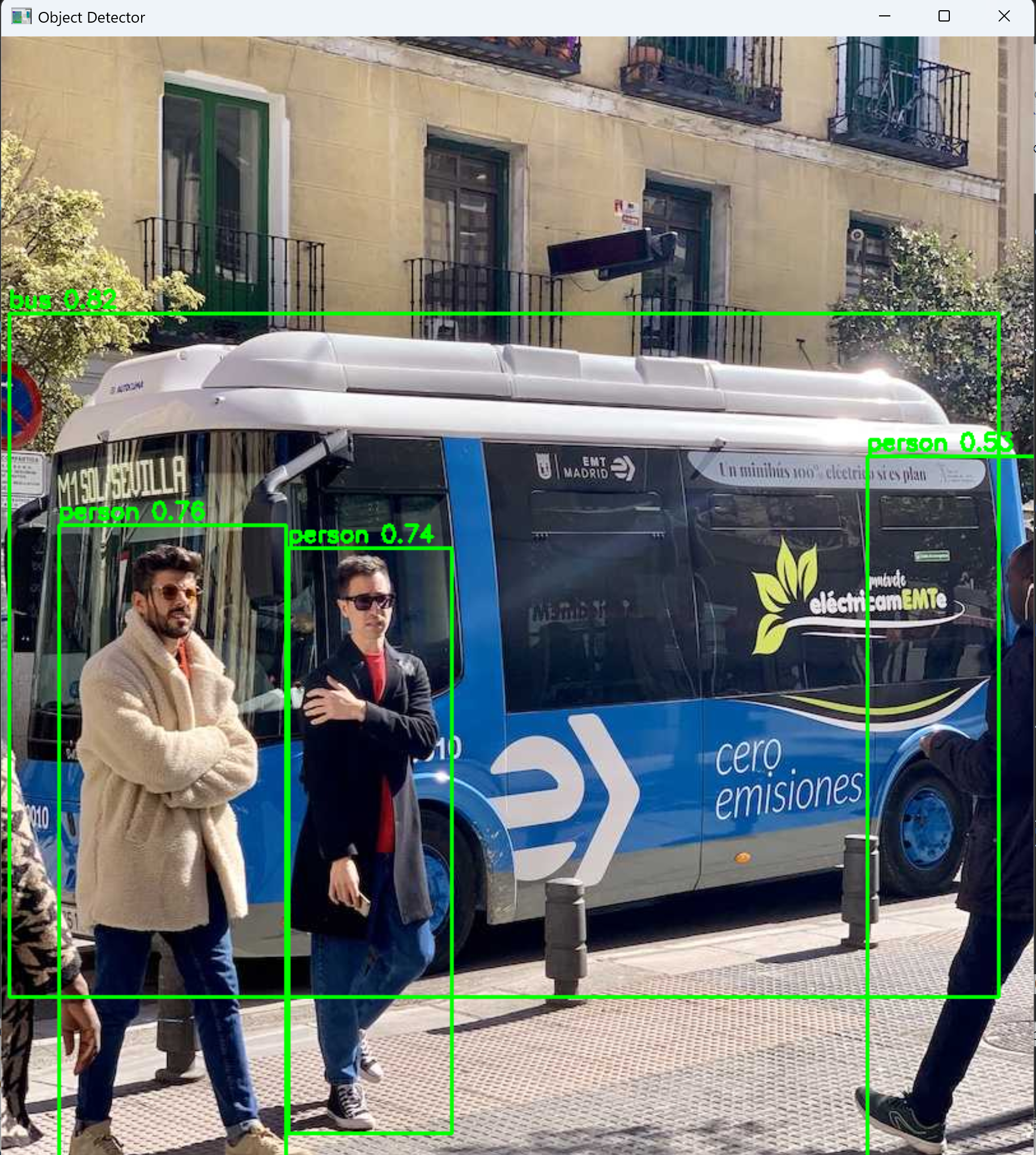
- VS Code 下部のターミナルで実行結果を確認する.OpenCV ウィンドウ(OpenCV が画像を表示するために開く専用ウィンドウ)が開いた場合はそちらも確認する.OpenCV ウィンドウは,マウスクリックでウィンドウをアクティブ(操作対象の状態)にしてからキーを押すと終了する

OpenCV ライブラリのインストール [クリックして展開]
Python で OpenCV を使用するためのライブラリである.
管理者権限のコマンドプロンプトで以下を実行する。管理者権限のコマンドプロンプトを起動するには、Windows キーまたはスタートメニューから「cmd」と入力し、表示された「コマンドプロンプト」を右クリックして「管理者として実行」を選択する。
python -m pip install -U opencv-python opencv-contrib-python
3. 実行のための準備とその確認手順(Windows 前提)
3.1 プログラムファイルの準備
第5章のソースコードをテキストエディタ(Visual Studio Codeやメモ帳など)に貼り付け実行する(文字コード:UTF-8).
3.2 実行コマンド
コマンドプロンプトでファイルの保存先ディレクトリに移動し,以下のように実行する(例:動画ファイルの表示).
python video_play.py他のプログラムも同様に,対応するファイル名を指定して実行する.
3.3 動作確認チェックリスト
| 確認項目 | 期待される結果 |
|---|---|
| 動画ファイルの表示プログラム起動時 | ウインドウが開き,動画が1フレームずつ表示される(早送りに見えるのは正常動作) |
| ビデオカメラのプログラム起動時 | ウインドウが開き,カメラ映像がリアルタイムで表示される |
| 「q」キーの押下 | ウインドウが閉じ,プログラムが終了する |
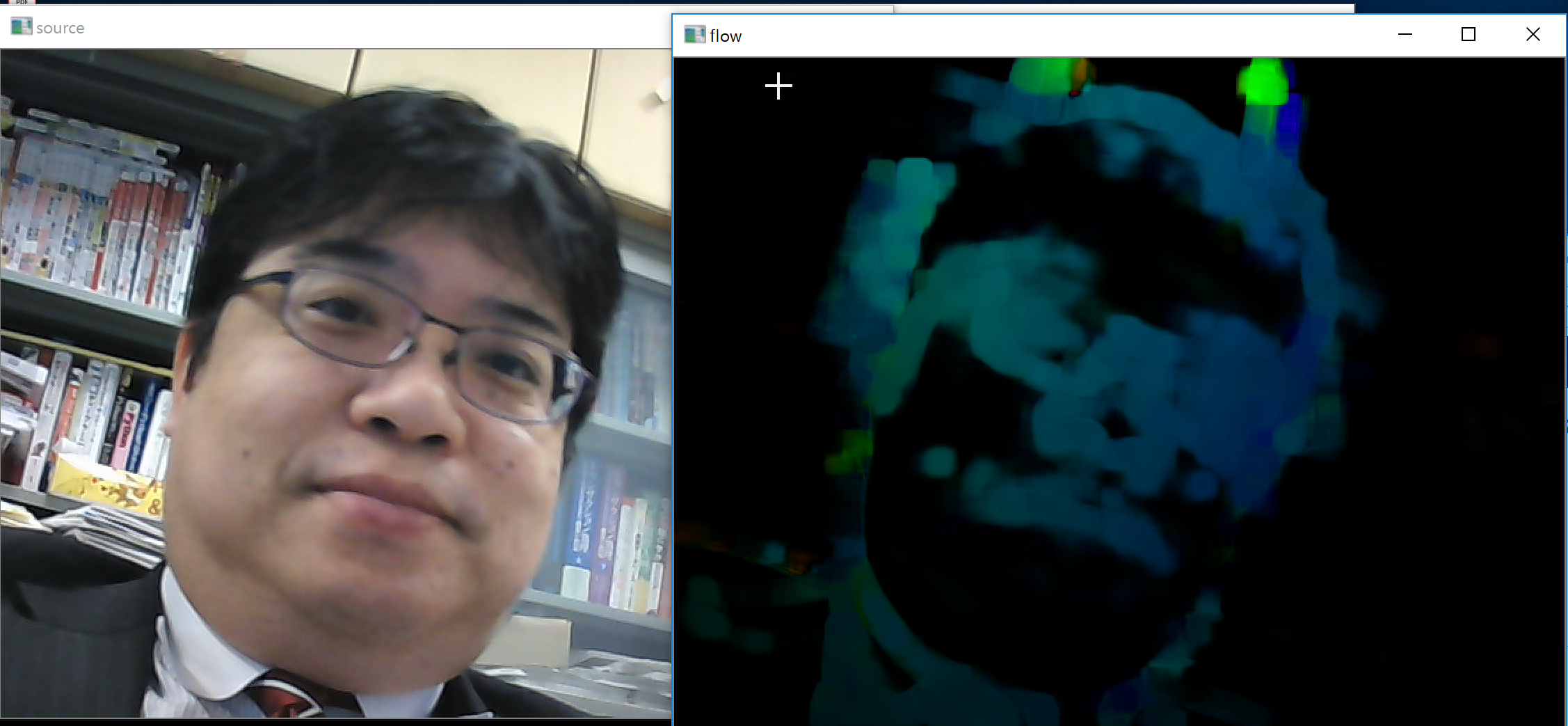
| オプティカルフローのプログラム起動時 | 元映像ウインドウ(source)とフロー表示ウインドウ(flow)の2つが開く |
4. 概要・使い方・実行上の注意
使用する動画ファイルの準備
使用する動画ファイル:sample1.mp4
ダウンロード方法:コマンドプロンプトを管理者として開き,次のコマンドを実行する.
mkdir c:\image
cd c:\image
curl -O https://www.kkaneko.jp/sample/face/sample1.mp4
上のコマンドが実行できないときは, sample1.mp4 をダウンロードし,C:/image に置く.
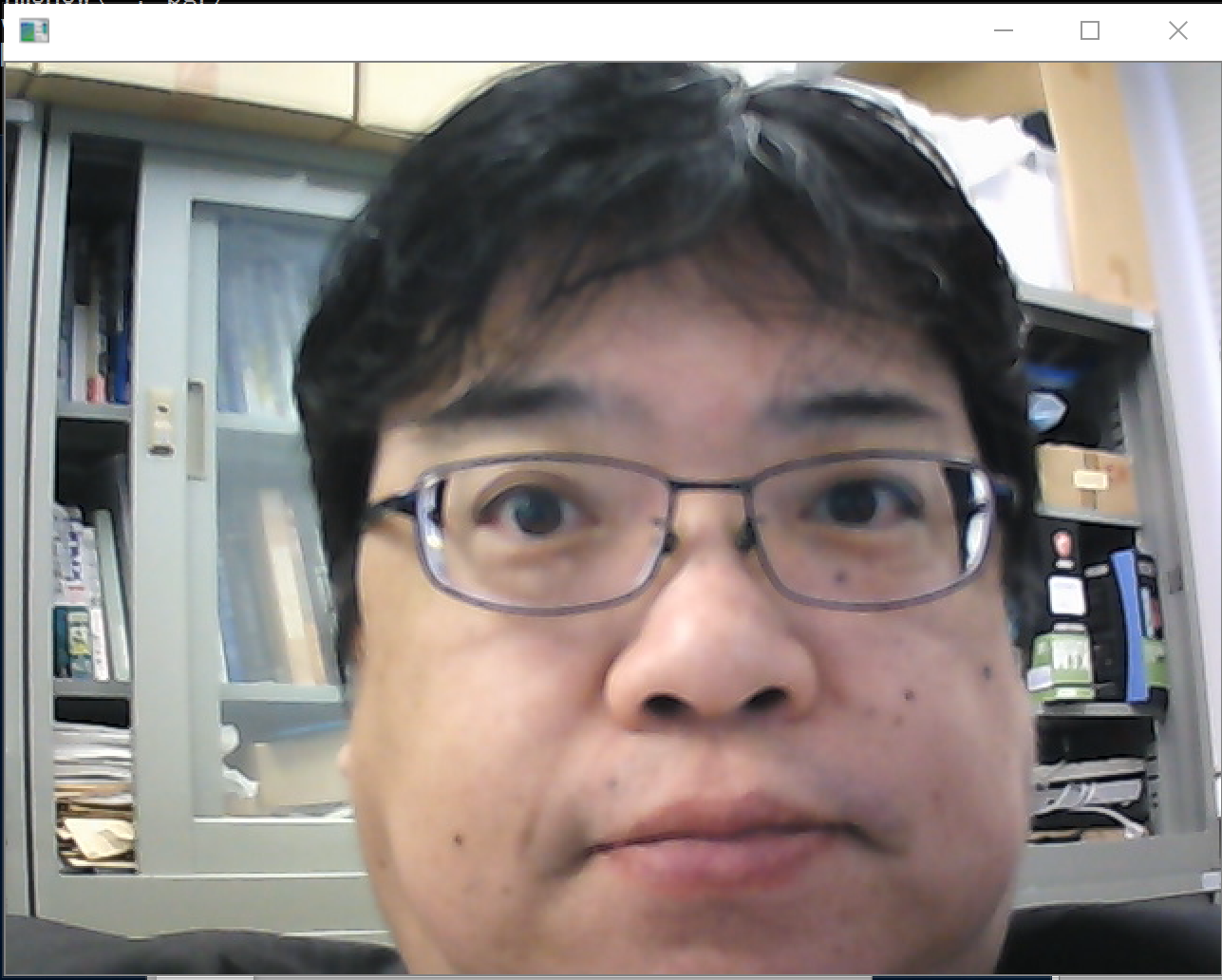
動画ファイルの表示
1フレームずつファイルから読み出して表示を繰り返す.早送りに見えるのは正常動作である.
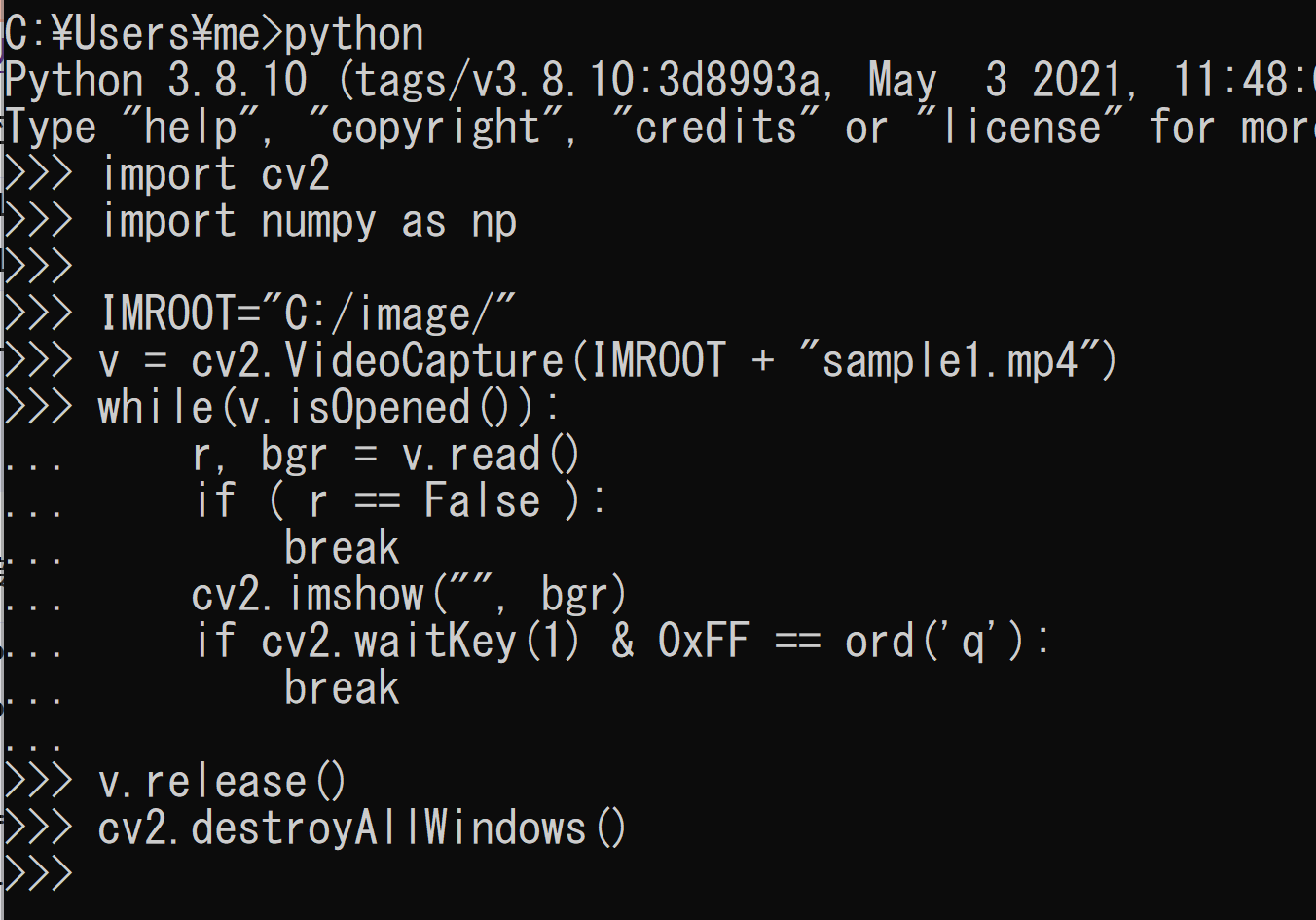

表示を確認する.ウインドウの右上の「x」をクリックしない.画面の中をクリックしてから,「q」キーを押して閉じる.以下同様.
パソコン接続ビデオカメラの表示
パソコンに接続できるビデオカメラを準備し,パソコンに接続しておく.コードは「v = cv2.VideoCapture(0)」に変えただけである.
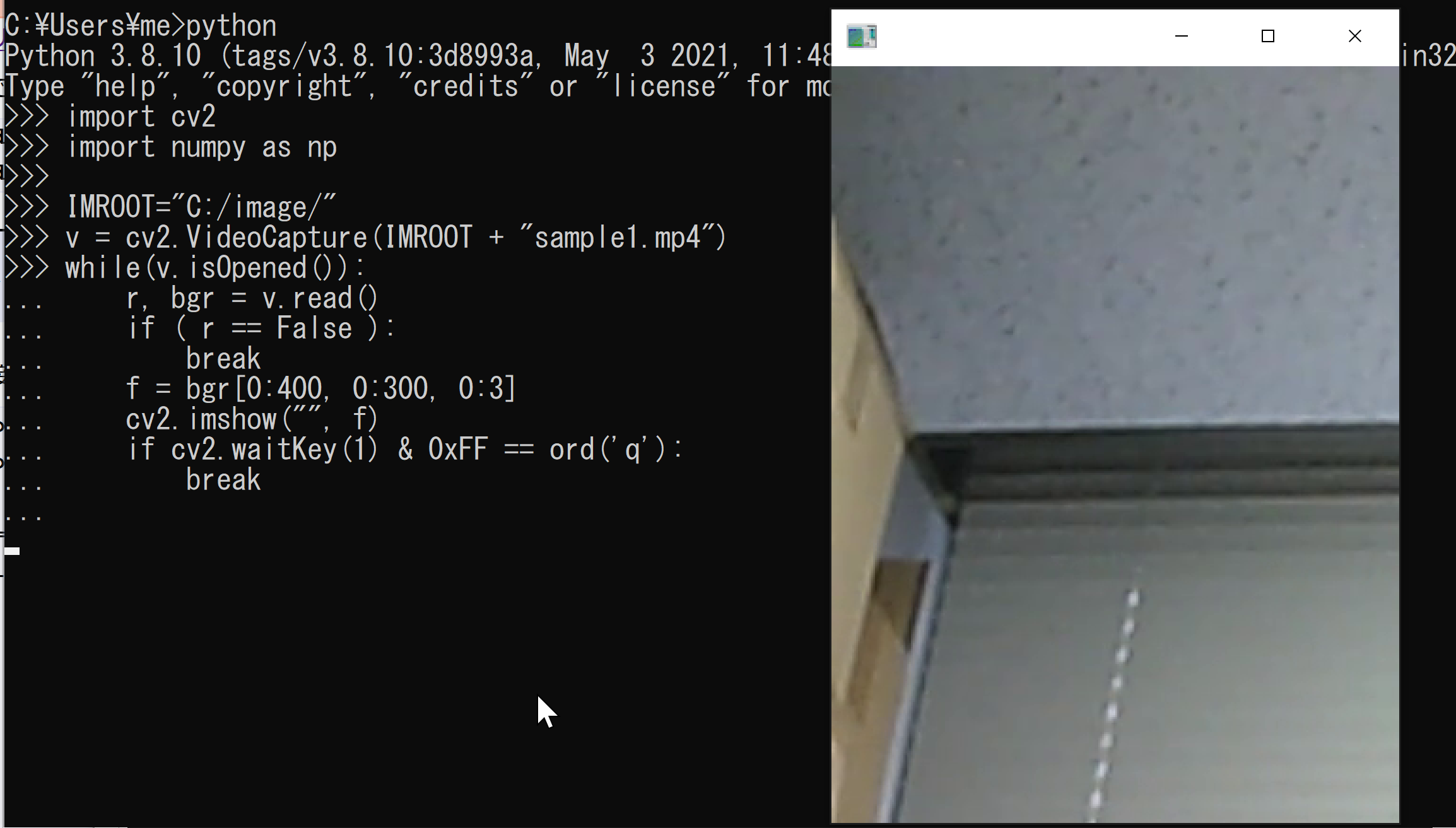
動画ファイルの表示(必要部分の切り出し)
「bgr[0:400, 0:300, 0:3]」で範囲を指定して,必要部分を切り出している.
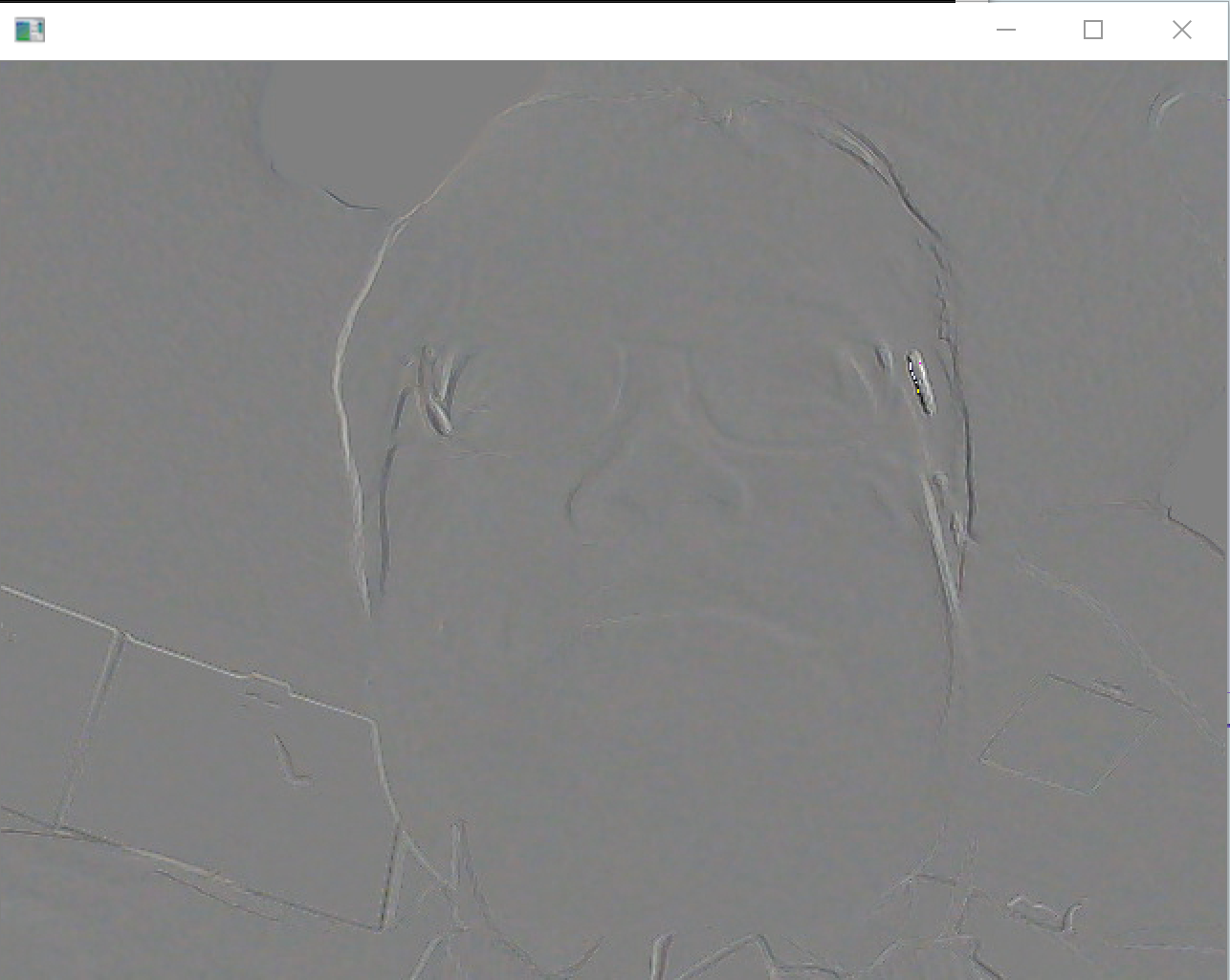
連続フレームの差分表示(フレーム間差分)
表示の一部分を以下に示す.
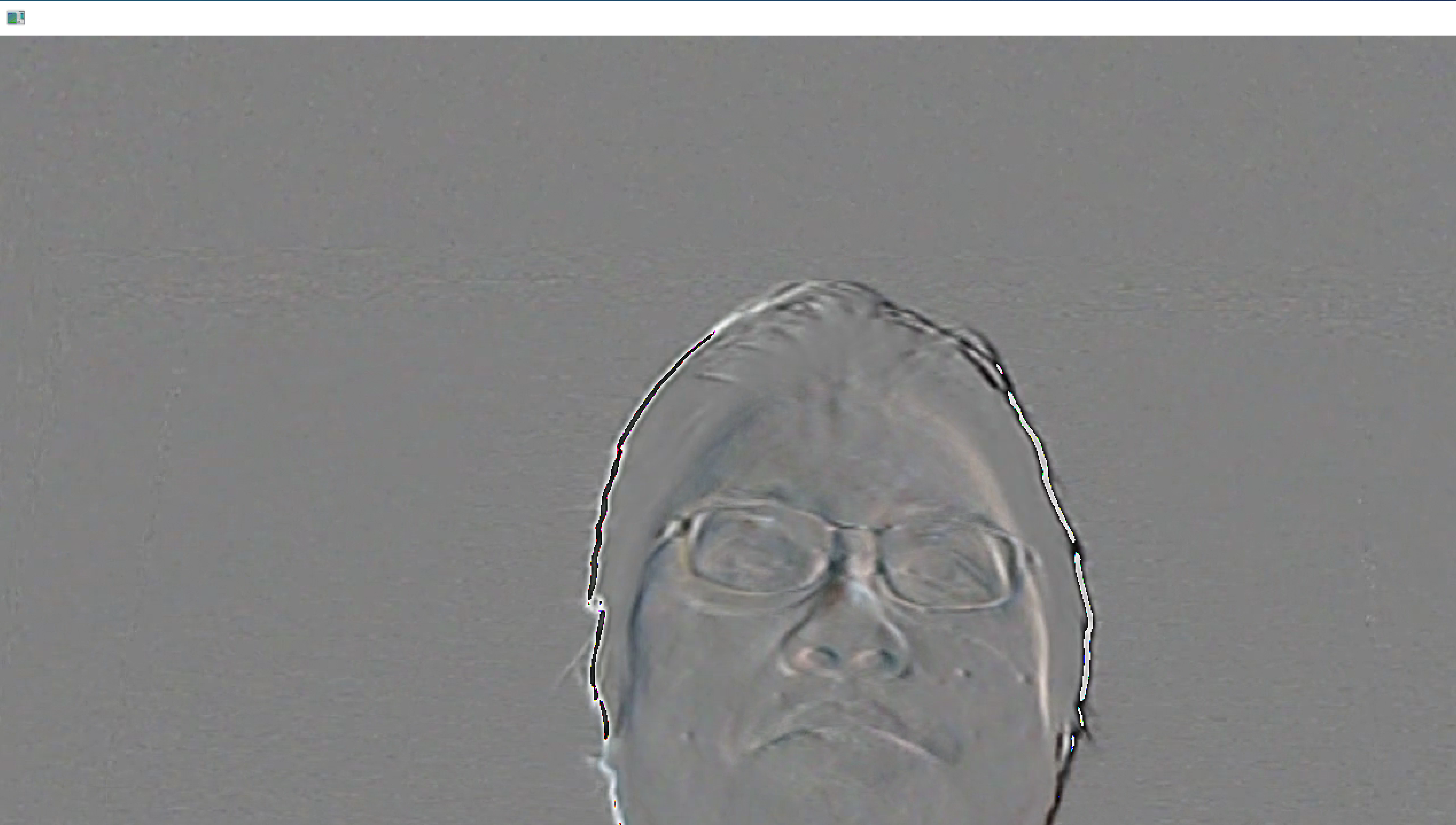
パソコン接続ビデオカメラ版は「v = cv2.VideoCapture(0)」に変えただけである.
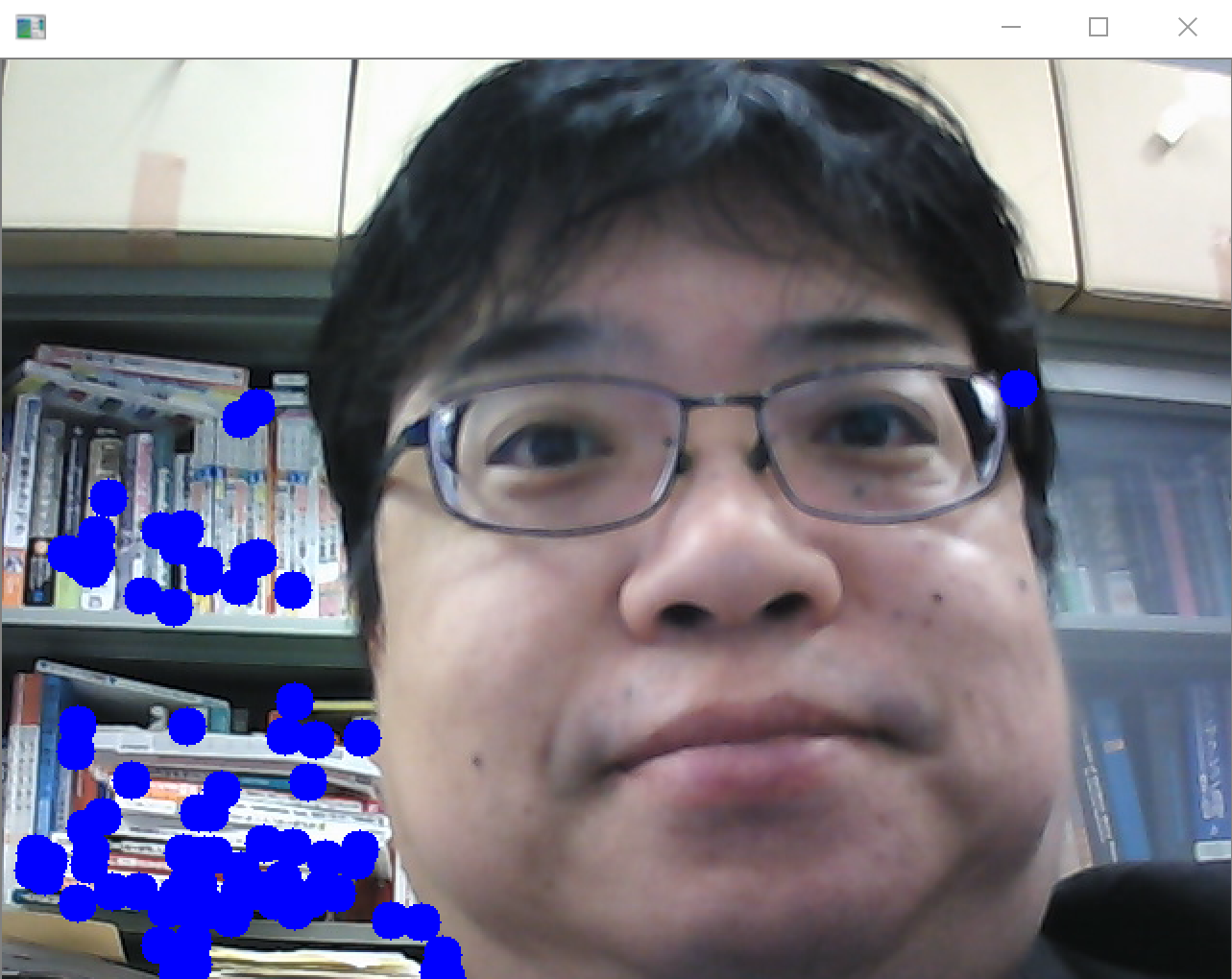
トラッキングビジョン
Shi-Tomasi の手法により,「トラッキングに適するポイント(追跡用の点)」を複数抜き出す.

パソコン接続ビデオカメラ版は「v = cv2.VideoCapture(0)」に変えただけである.
オプティカルフロー(Farneback の方法による)
オプティカルフローは,ビデオから「動きの情報」を取り出す手法である.
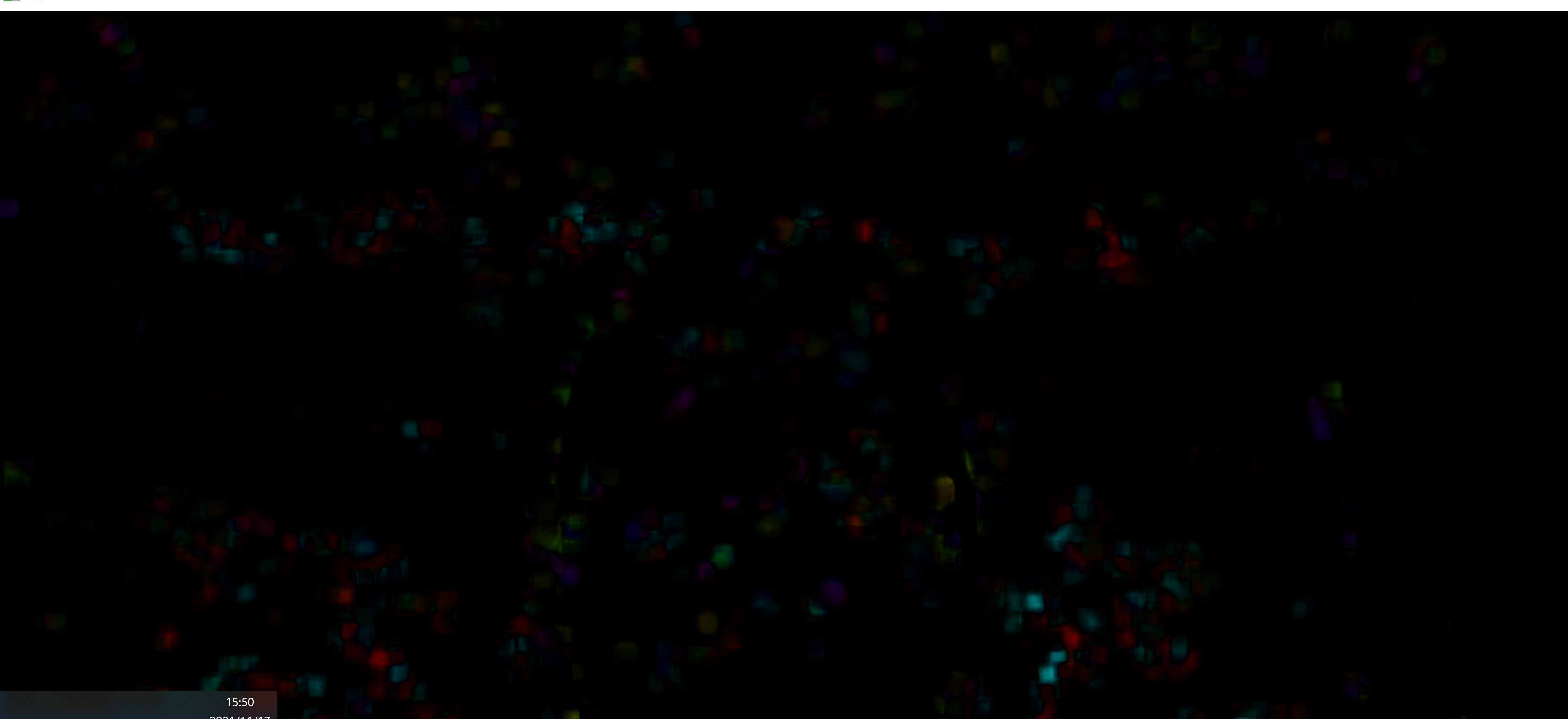
パソコン接続ビデオカメラ版は「v = cv2.VideoCapture(0)」に変えただけである.
DIS optical flow
謝辞:https://github.com/opencv/opencv/blob/master/samples/python/opt_flow.py で公開されているプログラムに手を加えて使用している(video パッケージを使わず,パソコンカメラを使用).
フレーム間差分による動体検出(二値化)
フレーム間差分にしきい値処理(二値化)を適用し,動きのある領域を白,それ以外を黒として検出する.cv2.absdiff で2フレーム間の差分の絶対値を求め,cv2.threshold で二値化を行う.
パソコン接続ビデオカメラ版は「v = cv2.VideoCapture(0)」に変えただけである.
ウインドウの閉じ方
全てのプログラムにおいて,途中で止めたいとき,右上の「x」をクリックしない.画面の中をクリックしてから,「q」のキーを押して閉じる.
5. ソースコード
動画ファイルの表示
import os
import numpy as np
import cv2
IMROOT = os.environ['LOCALAPPDATA'] + '/'
v = cv2.VideoCapture(IMROOT + "sample1.mp4")
while v.isOpened():
r, bgr = v.read()
if not r:
break
cv2.imshow("", bgr)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
v.release()
cv2.destroyAllWindows()
パソコン接続ビデオカメラの表示
import numpy as np
import cv2
v = cv2.VideoCapture(0)
while v.isOpened():
r, bgr = v.read()
if not r:
break
cv2.imshow("", bgr)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
v.release()
cv2.destroyAllWindows()
動画ファイルの表示(必要部分の切り出し)
import os
import numpy as np
import cv2
IMROOT = os.environ['LOCALAPPDATA'] + '/'
v = cv2.VideoCapture(IMROOT + "sample1.mp4")
while v.isOpened():
r, bgr = v.read()
if not r:
break
f = bgr[0:400, 0:300, 0:3]
cv2.imshow("", f)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
v.release()
cv2.destroyAllWindows()
連続フレームの差分表示(動画ファイル)
import os
import numpy as np
import cv2
IMROOT = os.environ['LOCALAPPDATA'] + '/'
v = cv2.VideoCapture(IMROOT + "sample1.mp4")
r, bgr = v.read()
while v.isOpened():
bgr2 = bgr
r, bgr = v.read()
if not r:
break
cv2.imshow("", bgr - bgr2 + 128)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
v.release()
cv2.destroyAllWindows()
連続フレームの差分表示(パソコン接続ビデオカメラ)
import numpy as np
import cv2
v = cv2.VideoCapture(0)
r, bgr = v.read()
while v.isOpened():
bgr2 = bgr
r, bgr = v.read()
if not r:
break
cv2.imshow("", bgr - bgr2 + 128)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
v.release()
cv2.destroyAllWindows()
トラッキングビジョン(動画ファイル)
import os
import numpy as np
import cv2
IMROOT = os.environ['LOCALAPPDATA'] + '/'
v = cv2.VideoCapture(IMROOT + "sample1.mp4")
while v.isOpened():
r, bgr = v.read()
if not r:
break
g = cv2.cvtColor(bgr, cv2.COLOR_BGR2GRAY)
d = cv2.goodFeaturesToTrack(g, 80, 0.01, 5, 3)
if d is not None:
for i in np.int0(d):
x, y = i.ravel()
cv2.circle(bgr, (x, y), 10, 255, -1)
cv2.imshow("", bgr)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
v.release()
cv2.destroyAllWindows()
トラッキングビジョン(パソコン接続ビデオカメラ)
import numpy as np
import cv2
v = cv2.VideoCapture(0)
while v.isOpened():
r, bgr = v.read()
if not r:
break
g = cv2.cvtColor(bgr, cv2.COLOR_BGR2GRAY)
d = cv2.goodFeaturesToTrack(g, 80, 0.01, 5, 3)
if d is not None:
for i in np.int0(d):
x, y = i.ravel()
cv2.circle(bgr, (x, y), 10, 255, -1)
cv2.imshow("", bgr)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
v.release()
cv2.destroyAllWindows()
オプティカルフロー(Farneback の方法,動画ファイル)
import os
import numpy as np
import cv2
IMROOT = os.environ['LOCALAPPDATA'] + '/'
v = cv2.VideoCapture(IMROOT + "sample1.mp4")
ret, bgr1 = v.read()
prvs = cv2.cvtColor(bgr1, cv2.COLOR_BGR2GRAY)
hsv = np.zeros_like(bgr1)
hsv[..., 1] = 255
while True:
ret, bgr2 = v.read()
if not ret:
break
nxt = cv2.cvtColor(bgr2, cv2.COLOR_BGR2GRAY)
flow = cv2.calcOpticalFlowFarneback(prvs, nxt, None, 0.5, 3, 15, 3, 5, 1.2, 0)
mag, ang = cv2.cartToPolar(flow[..., 0], flow[..., 1])
hsv[..., 0] = ang * 180 / np.pi / 2
hsv[..., 2] = cv2.normalize(mag, None, 0, 255, cv2.NORM_MINMAX)
rgb = cv2.cvtColor(hsv, cv2.COLOR_HSV2BGR)
cv2.imshow('source', bgr2)
cv2.imshow('flow', rgb)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
prvs = nxt
v.release()
cv2.destroyAllWindows()
オプティカルフロー(Farneback の方法,パソコン接続ビデオカメラ)
import numpy as np
import cv2
v = cv2.VideoCapture(0)
ret, bgr1 = v.read()
prvs = cv2.cvtColor(bgr1, cv2.COLOR_BGR2GRAY)
hsv = np.zeros_like(bgr1)
hsv[..., 1] = 255
while True:
ret, bgr2 = v.read()
if not ret:
break
nxt = cv2.cvtColor(bgr2, cv2.COLOR_BGR2GRAY)
flow = cv2.calcOpticalFlowFarneback(prvs, nxt, None, 0.5, 3, 15, 3, 5, 1.2, 0)
mag, ang = cv2.cartToPolar(flow[..., 0], flow[..., 1])
hsv[..., 0] = ang * 180 / np.pi / 2
hsv[..., 2] = cv2.normalize(mag, None, 0, 255, cv2.NORM_MINMAX)
rgb = cv2.cvtColor(hsv, cv2.COLOR_HSV2BGR)
cv2.imshow('source', bgr2)
cv2.imshow('flow', rgb)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
prvs = nxt
v.release()
cv2.destroyAllWindows()
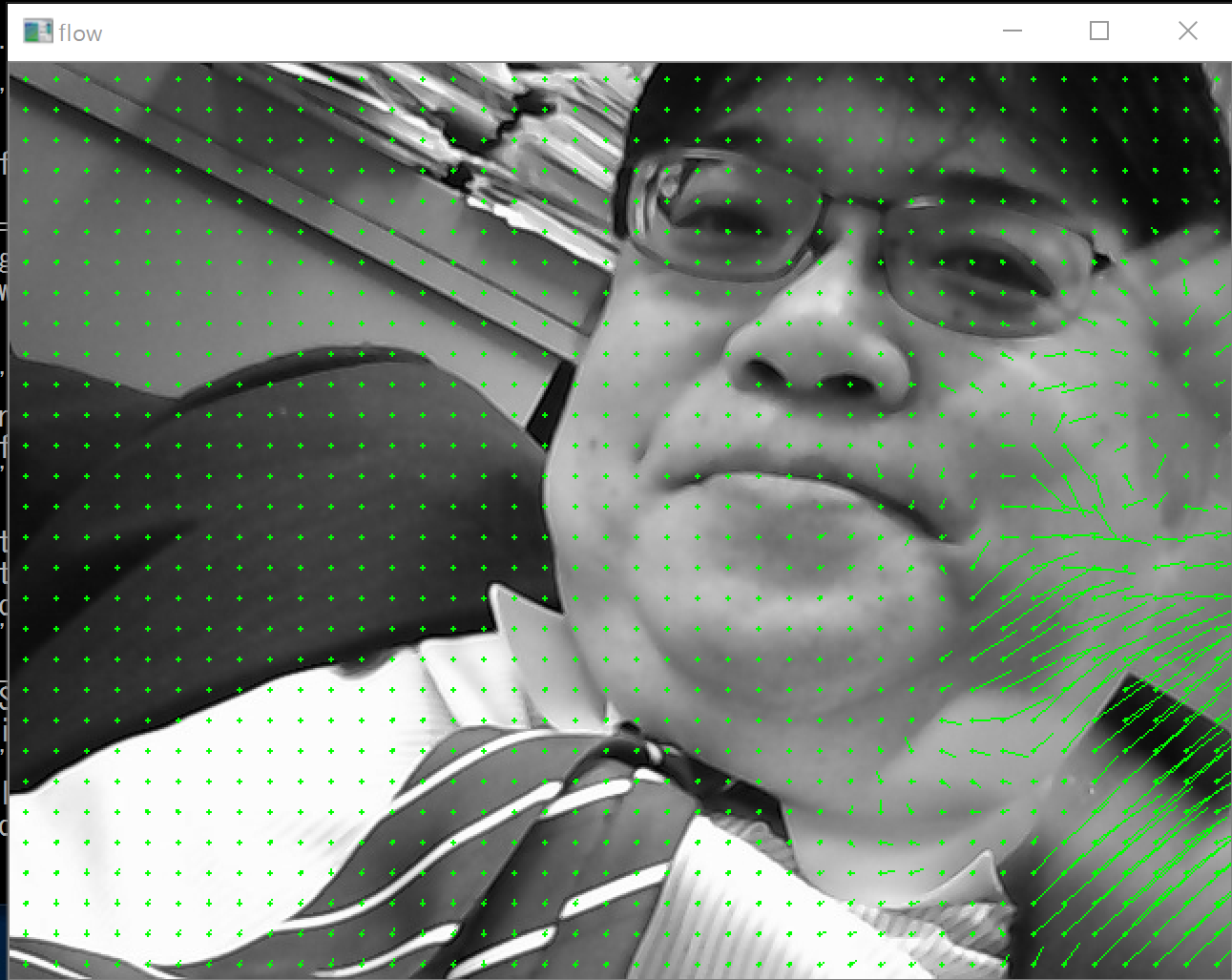
DIS optical flow
import numpy as np
import cv2 as cv
def draw_flow(img, flow, step=16):
h, w = img.shape[:2]
y, x = np.mgrid[step/2:h:step, step/2:w:step].reshape(2, -1).astype(int)
fx, fy = flow[y, x].T
lines = np.vstack([x, y, x+fx, y+fy]).T.reshape(-1, 2, 2)
lines = np.int32(lines + 0.5)
vis = cv.cvtColor(img, cv.COLOR_GRAY2BGR)
cv.polylines(vis, lines, 0, (0, 255, 0))
for (x1, y1), (_x2, _y2) in lines:
cv.circle(vis, (x1, y1), 1, (0, 255, 0), -1)
return vis
def draw_hsv(flow):
h, w = flow.shape[:2]
fx, fy = flow[:, :, 0], flow[:, :, 1]
ang = np.arctan2(fy, fx) + np.pi
v = np.sqrt(fx*fx + fy*fy)
hsv = np.zeros((h, w, 3), np.uint8)
hsv[..., 0] = ang * (180 / np.pi / 2)
hsv[..., 1] = 255
hsv[..., 2] = np.minimum(v*4, 255)
return cv.cvtColor(hsv, cv.COLOR_HSV2BGR)
def warp_flow(img, flow):
h, w = flow.shape[:2]
flow = -flow
flow[:, :, 0] += np.arange(w)
flow[:, :, 1] += np.arange(h)[:, np.newaxis]
return cv.remap(img, flow, None, cv.INTER_LINEAR)
cam = cv.VideoCapture(0)
ret, prev = cam.read()
prevgray = cv.cvtColor(prev, cv.COLOR_BGR2GRAY)
show_hsv = False
show_glitch = False
use_spatial_propagation = False
use_temporal_propagation = True
cur_glitch = prev.copy()
inst = cv.DISOpticalFlow.create(cv.DISOPTICAL_FLOW_PRESET_MEDIUM)
inst.setUseSpatialPropagation(use_spatial_propagation)
flow = None
while True:
ret, img = cam.read()
if not ret:
break
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
if flow is not None and use_temporal_propagation:
flow = inst.calc(prevgray, gray, warp_flow(flow, flow))
else:
flow = inst.calc(prevgray, gray, None)
prevgray = gray
cv.imshow('flow', draw_flow(gray, flow))
if show_hsv:
cv.imshow('flow HSV', draw_hsv(flow))
if show_glitch:
cur_glitch = warp_flow(cur_glitch, flow)
cv.imshow('glitch', cur_glitch)
ch = 0xFF & cv.waitKey(5)
if ch == 27:
break
if ch == ord('1'):
show_hsv = not show_hsv
if ch == ord('2'):
show_glitch = not show_glitch
if show_glitch:
cur_glitch = img.copy()
if ch == ord('3'):
use_spatial_propagation = not use_spatial_propagation
inst.setUseSpatialPropagation(use_spatial_propagation)
if ch == ord('4'):
use_temporal_propagation = not use_temporal_propagation
cam.release()
cv.destroyAllWindows()
フレーム間差分による動体検出(動画ファイル)
import os
import numpy as np
import cv2
IMROOT = os.environ['LOCALAPPDATA'] + '/'
v = cv2.VideoCapture(IMROOT + "sample1.mp4")
r, prev = v.read()
prev_gray = cv2.cvtColor(prev, cv2.COLOR_BGR2GRAY)
while v.isOpened():
r, bgr = v.read()
if not r:
break
gray = cv2.cvtColor(bgr, cv2.COLOR_BGR2GRAY)
diff = cv2.absdiff(prev_gray, gray)
_, thresh = cv2.threshold(diff, 30, 255, cv2.THRESH_BINARY)
cv2.imshow("source", bgr)
cv2.imshow("motion", thresh)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
prev_gray = gray
v.release()
cv2.destroyAllWindows()
フレーム間差分による動体検出(パソコン接続ビデオカメラ)
import numpy as np
import cv2
v = cv2.VideoCapture(0)
r, prev = v.read()
prev_gray = cv2.cvtColor(prev, cv2.COLOR_BGR2GRAY)
while v.isOpened():
r, bgr = v.read()
if not r:
break
gray = cv2.cvtColor(bgr, cv2.COLOR_BGR2GRAY)
diff = cv2.absdiff(prev_gray, gray)
_, thresh = cv2.threshold(diff, 30, 255, cv2.THRESH_BINARY)
cv2.imshow("source", bgr)
cv2.imshow("motion", thresh)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
prev_gray = gray
v.release()
cv2.destroyAllWindows()
6. まとめ
フレーム間差分
連続する2フレーム間の差分を計算し表示する手法である.差分に128を加算することで,変化のない領域をグレー,変化のある領域を明暗で表現する.
フレーム間差分による動体検出(二値化)
フレーム間差分にしきい値処理(二値化)を適用し,動きのある領域を白,それ以外を黒として検出する手法である.cv2.absdiff と cv2.threshold を使用する.
トラッキングビジョン
Shi-Tomasi の手法により,「トラッキングに適するポイント(追跡用の点)」を複数抜き出す.cv2.goodFeaturesToTrack で特徴点を検出し,各フレーム上に円で描画する.
オプティカルフロー(Farneback の方法)
ビデオから「動きの情報」を取り出す手法である.cv2.calcOpticalFlowFarneback により密なオプティカルフローを計算し,HSV色空間で動きの方向と大きさを可視化する.
DIS optical flow
cv2.DISOpticalFlow を使用したオプティカルフローの実装である.フロー表示,HSV可視化,グリッチ表示のモードを備え,空間伝搬・時間伝搬の切り替えにも対応している.