| [�T�C�g�}�b�v��], | [�T�C�g�������] |
�_�W���iA�Ƃ���j��ʂ̃x�N�g���W���iB�Ƃ���j�Ƀ}�b�`���O������B ���̂Ƃ��AA �̊e�v�f�Ɋ��if�Ƃ���j��K�p����D�����錋�ʂ� f(A) �ł���D f(A) ���Ȃ�ׂ� B �Ɂu�߂Â��v�悤�Ɋ� f �̃p�����[�^�i�����j������D
�� �����̌v�Z
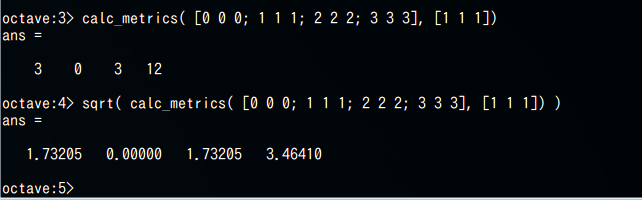
function Metrics = calc_metrics(B, p) # metrics between all data points in 'B' and 'p'. Diff = (B - repmat( p, size(B)(1), 1 ))'; # Euclidian distance Metrics = sum(Diff .* Diff); clear Diff endfunction
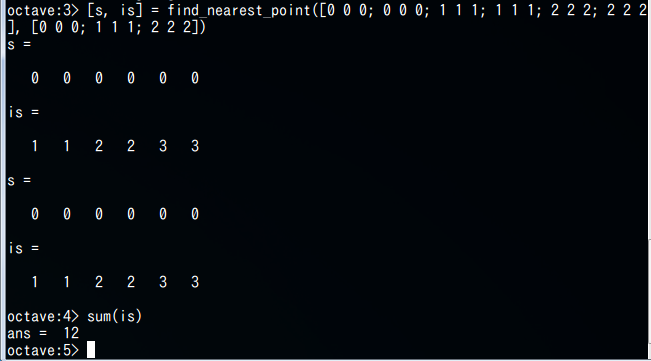
function [s, is] = find_nearest_point(A, B)
# two data point sets A and B are given
# 2�̓_�W�� A, B ���^������
num_points_A = size(A)(1);
num_points_B = size(B)(1);
# 'D' is a matrix to store the distance between data points A and B
# A �̓_�� B�̓_�Ԃ̋����̓���s�� D �Ɋi�[����
D = zeros(num_points_A, num_points_B);
for i = 1:num_points_B
D(:,i) = calc_metrics( A, B(i,:) );
endfor
# the point number in B that is nearest from each point in A
# A �̊e�_����ł�߂� B �̓_�̓_�ԍ��� is �ɓ���
[s, is] = min(D');
clear D
endfunction
local minimum
# move a point
# �_�̈ړ�
function p2 = move(dx, dy, dz, p)
p2 = p + [dx dy dz];
endfunction
# move points A and calculate find_nearest_point(A, B)
# �_�W�� A �̈ړ�. ���̌�Cfind_nearest_point(A, B)
function d2 = metrics(dx, dy, dz, A, B)
num_points_A = size(A)(1);
A2 = zeros(num_points_A, 3);
for i = 1:num_points_A
A2(i,:) = move( dx, dy, dz, A(i,:) );
endfor
[s, is] = find_nearest_point(A2, B);
d2 = sum(s);
clear A2;
endfunction
global A B
A = [0 0 0; 0 0 0; 1 1 1; 1 1 1; 2 2 2; 2 2 2];
B = [100 100 100; 101 101 101; 102 102 102];
f = @(x) metrics(x(1), x(2), x(3), A, B);
fminunc(f, [0 0 0])
�{�T�C�g�̃T�C�g�}�b�v�́C�T�C�g�}�b�v�̃y�[�W������������D �{�T�C�g��̌����́C�T�C�g������̃y�[�W������p�������D
�₢���킹��F ��q�M�F�i���˂� ���ɂЂ��j ![[image]](https://www.kkaneko.jp/info/kanekomail.png)